La tâche principale du contrôleur de réfrigérateur est de maintenir la température réglée dans la chambre. Cela sera fait par le contrôleur de température en changeant la puissance électrique sur le module Peltier.
Dans la leçon précédente, nous avons développé un régulateur de puissance. La relation entre les régulateurs de puissance et de température ressemble à ceci.
- Le régulateur de température reçoit la température mesurée, la compare à la température réglée et calcule la valeur de puissance réglée pour le régulateur de puissance.
- Le régulateur de puissance génère un PWM correspondant à la puissance donnée.
Nous avons construit le régulateur de puissance selon la loi de régulation intégrale. Pour stabiliser la température, nous utiliserons un algorithme de contrôle plus complexe - un contrôleur proportionnel-intégral-différenciant (PID).
Contrôleur PID.
Dans la leçon précédente, j'ai parlé en détail de . Souligné ses forces et ses faiblesses.
Le régulateur, fonctionnant sur ce principe, a une grande précision. Les autres critères de qualité de la régulation - vitesse et stabilité - ne sont pas à la hauteur.
Afin d'atteindre des performances élevées pour tous les critères, il est nécessaire d'utiliser un régulateur qui combine différentes lois de régulation.
Un tel dispositif est un contrôleur proportionnel-intégral-dérivé (PID). Il génère un signal de sortie qui est la somme de trois composants avec des caractéristiques de transfert différentes. Grâce à cela, le contrôleur PID fournit un contrôle de haute qualité et vous permet d'optimiser le contrôle en fonction de critères individuels.
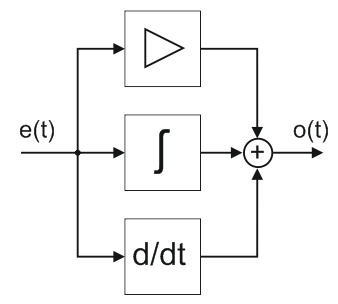
Les éléments suivants sont impliqués dans la formation du signal de sortie du régulateur PID :
- Proportionnel est la valeur proportionnelle à l'erreur de non-concordance (différence entre la valeur spécifiée et valeurs réelles paramètre réglable).
- Composant intégrateur est l'intégrale de l'erreur de non-concordance.
- Composant différenciateur est la dérivée de l'erreur d'inadéquation.
La forme mathématique de la loi du régulateur PID a la forme :
o(t) = P + je + ré = K p e(t) + K je ∫e(t)dt + K ré de(t)/dt
- o(t) – signal de sortie ;
- P est la composante proportionnelle ;
- I - composant d'intégration ;
- D - composant de différenciation ;
- Kp, Ki, Kd - coefficients de liens proportionnels, intégrants, différenciants;
- e(t) est l'erreur d'inadéquation.
Sous une forme schématique, le régulateur PID peut être représenté comme suit.
Le schéma fonctionnel du régulateur de tension PID U ressemble à ceci.
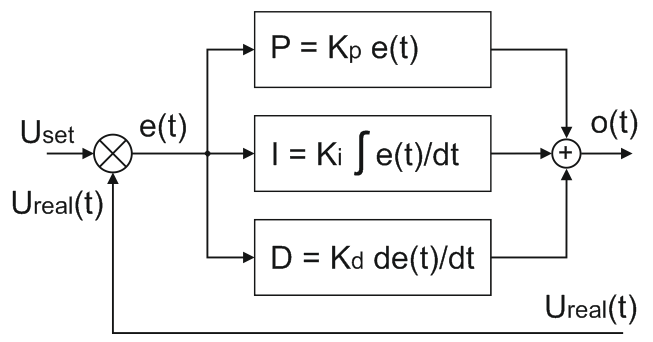
- La tension mesurée Ureal(t) est soustraite de la Uset donnée.
- L'erreur de non-concordance résultante e(t) est transmise aux liaisons proportionnelle, d'intégration et de différenciation.
- Comme résultat de la somme des composants, l'action de commande o(t) est obtenue, qui est appliquée à l'élément de commande.
Avec une implémentation logicielle du contrôleur PID, le signal de sortie est calculé à intervalles réguliers. Celles. le contrôleur est discret dans le temps. Par conséquent, j'utiliserai plus loin des expressions : l'état précédent du signal, la valeur précédente, etc. Il s'agit de sur l'état du système au point d'échantillonnage temporel précédent.
Composants du régulateur PID.
De nouveau. Le signal de sortie du régulateur PID est la somme de trois composants :
- proportionnel;
- en intégrant;
- différencier.
composante proportionnelle.
P(t) = Kp * e(t)
N'a pas de mémoire, c'est-à-dire la valeur du signal de sortie ne dépend pas de l'état précédent du système. Seule l'erreur de non-concordance multipliée par le facteur est transmise à la sortie. Le signal de sortie compense l'écart de la grandeur réglée. Plus le signal est grand, plus l'erreur de non-concordance est grande. Si l'erreur est 0, le signal de sortie est également 0.
La composante proportionnelle n'est pas en mesure de compenser complètement l'erreur. Cela peut être vu à partir de la formule. Le signal de sortie est Kp fois plus grand que l'erreur. Si l'erreur de non-concordance est de 0, alors le signal de sortie du contrôleur est de 0. Et puis il n'y a rien à compenser.
Par conséquent, dans les contrôleurs proportionnels, il y a toujours une erreur dite statique. Il peut être réduit en augmentant le coefficient Kp, mais cela peut conduire à une diminution de la stabilité du système et même à des auto-oscillations.
Les inconvénients des régulateurs proportionnels comprennent :
- la présence d'une erreur de contrôle statique ;
- faible stabilité avec un coefficient croissant.
Il y a un avantage non négligeable :
- Vitesse de régulation élevée. La réponse d'un régulateur proportionnel à une erreur de poursuite n'est limitée que par le temps d'échantillonnage du système.
Les régulateurs qui fonctionnent uniquement selon la loi proportionnelle sont rarement utilisés.
La tâche principale du composant proportionnel dans le régulateur PID est d'augmenter la vitesse.
composant d'intégration.
je(t) = K je ∫e(t)dt
Proportionnel à l'intégrale de l'erreur d'inadéquation. Compte tenu de la discrétion temporelle du contrôleur, on peut écrire comme suit :
je(t) = je(t -1) + K je * e(t)
- I(t-1) est la valeur de I au point d'échantillonnage temporel précédent.
L'erreur de non-concordance est multipliée par un facteur et ajoutée à la valeur précédente de l'intégrateur. Celles. le signal de sortie s'accumule tout le temps et augmente son impact sur l'objet au fil du temps. Ainsi, l'erreur d'inadéquation est entièrement compensée même pour de petites valeurs de l'erreur et du coefficient Ki. En régime établi, le signal de sortie du régulateur est intégralement fourni par le composant intégrateur.
Les inconvénients d'un régulateur intégré comprennent :
- faible vitesse;
- stabilité moyenne.
Dignité:
- La capacité de compenser entièrement l'erreur d'inadéquation à n'importe quel gain.
En pratique, on utilise souvent des contrôleurs intégrateurs (composant intégrateur uniquement) et intégrateurs proportionnels (composants intégrateurs et proportionnels).
La tâche principale du lien d'intégration dans le régulateur PID est de compenser l'erreur statique et d'assurer une grande précision de régulation.
élément différenciateur.
D(t) = Kdde(t)/dt
Proportionnel au taux de variation de l'erreur d'inadéquation. Un indicateur particulier de l'accélération des erreurs de non-concordance. Le terme dérivé prédit les déviations de la variable contrôlée dans le futur et compense cette déviation. En règle générale, il compense les retards d'action du contrôleur sur l'objet et augmente la stabilité du système.
Compte tenu de la discrétion temporelle du contrôleur, la composante différenciatrice peut être calculée comme suit :
ré(t) = K ré * (e(t) - e(t -1))
Il montre de combien la valeur d'erreur de non-concordance a changé dans une unité de temps de la discrétion du contrôleur.
Il n'existe pas de régulateurs constitués d'un seul maillon différenciateur.
La tâche principale du lien de différenciation dans le régulateur PID est d'augmenter la stabilité.
Configuration du contrôleur PID.
La qualité de la régulation des régulateurs PID dépend en grande partie du choix optimal des coefficients. Les coefficients du contrôleur PID sont déterminés en pratique dans un système avec un objet réel par sélection. Il existe différentes méthodes de réglage. Je ne parlerai que des principes généraux.
La qualité de la régulation est jugée par la réponse transitoire du régulateur. Celles. selon le calendrier d'évolution du paramètre contrôlé dans le temps.
Aux points traditionnels de la séquence de réglage du régulateur PID, j'ajouterai qu'il faut tout d'abord déterminer quels critères de qualité de régulation sont préférables.
Dans la leçon précédente, lors de la conception d'un régulateur de puissance, nous nous sommes principalement intéressés à la précision et à la stabilité. Et nous avons même artificiellement réduit la vitesse. Certains régulateurs fonctionnent dans des conditions d'interférences importantes et la stabilité est plus importante pour eux, d'autres nécessitent une vitesse élevée même au détriment de la précision. Les critères d'optimisation peuvent être différents. En général, les contrôleurs PID sont réglés pour garantir que tous les critères de qualité de contrôle sont à un niveau élevé.
Les composants du régulateur PID sont configurés séparément.
- Les liens d'intégration et de différenciation sont désactivés et le coefficient du lien proportionnel est sélectionné. Si le régulateur intègre proportionnellement (il n'y a pas de lien différenciateur), alors une absence totale d'oscillations dans la réponse transitoire est obtenue. Lorsque le régulateur est réglé sur une vitesse élevée, des fluctuations peuvent subsister. Ils essaieront de compenser le lien différenciateur.
- Le différenciateur est connexe. Son coefficient cherche à éliminer les fluctuations du paramètre de régulation. En cas d'échec, réduisez le coefficient proportionnel.
- En raison du lien d'intégration, l'erreur de non-concordance résiduelle est supprimée.
Le réglage du régulateur PID est itératif. Celles. les points de sélection des coefficients peuvent être répétés plusieurs fois jusqu'à ce qu'un résultat acceptable soit atteint.
En raison de leurs hautes performances et de leur polyvalence, les contrôleurs PID sont largement utilisés dans les systèmes d'automatisation industrielle.
Dans la prochaine leçon, nous développerons un régulateur de température PID.
Il s'agit d'un petit appareil électronique qui comprend une carte de circuit imprimé, capable de contrôler divers appareils et équipements (y compris des moteurs électriques), de recevoir et de transmettre des données.
Un vrai début dans la connaissance des outils matériels et logiciels pour construire des automatismes simples. Il est très facile à apprendre et ne nécessite presque aucun prérequis autre qu'un esprit curieux.
A une valeur en tant que guide d'étude pour les néophytes, et comme outil de mise en œuvre de projet pour les amateurs, et comme outil de prototypage pour les professionnels.
Pour les néophytes, tout ici paraîtra nouveau. Pour les passionnés d'Arduino, un appareil pour appliquer leurs connaissances et se concentrer sur des éléments nouveaux pour eux ou difficiles à saisir. Les professionnels utilisent l'appareil dans le but d'obtenir un projet prototype avec le coût le plus bas de mise en œuvre de matériel et de micrologiciel personnalisés.
Dans tous les cas, l'utilisateur aura une bonne compréhension de la programmation C. C'est un excellent point de départ.
Que devez-vous savoir avant de commencer à travailler avec Arduino ?
Aucune connaissance particulière n'est certainement requise, mais vous devez être capable de lire et de suivre les instructions. Ils sont conçus pour initier les débutants à l'électronique et à la programmation. La plupart des jeunes déjà âgés de 12 ans et plus maîtrisent facilement la technique.
Quoi d'autre doit être rappelé? Les LED ne s'allument pas si elles sont installées avec la mauvaise polarité. Les diodes installées dans le sens inverse peuvent provoquer un court-circuit. L'électricité statique des mains peut endommager ou détruire les circuits intégrés et les transistors.
N'utilisez jamais d'équipement connecté à l'alimentation secteur en raison du risque de choc électrique.
Comment commencer à concevoir un système de contrôle pour un moteur asynchrone triphasé ?
Tout d'abord, regardez la vidéo, qui montre la mise en œuvre du projet. Après avoir regardé la vidéo, vous pourrez réaliser un petit projet dans Arduino.
Pourquoi les gens utilisent-ils Arduino pour contrôler un moteur à induction triphasé ?
Un moteur à induction triphasé est le moyen le plus efficace de convertir l'énergie électrique en couple. Le couple est converti en pression, la vitesse de déplacement influe à son tour sur le débit.
Le moyen le plus efficace d'ajuster la rotation du moteur électrique consiste à modifier la fréquence de l'alimentation électrique. Le plus simple est de le faire via le microcontrôleur.
Arduino est une marque d'outils matériels et logiciels pour la construction de systèmes d'automatisation et de robotique simples, destinés aux utilisateurs non professionnels.
La tension du secteur est réduite à l'aide d'un transformateur et le redressement est effectué à l'aide d'un pont de diodes. Le microcontrôleur fonctionne dans le mode d'un générateur de fréquence variable, commute la clé sur les transistors. La tension alternative est augmentée par un deuxième transformateur et envoyée aux enroulements de puissance du moteur.
La fréquence de commutation (ainsi que la vitesse de rotation de l'arbre du moteur) est réglée par une résistance variable dans une large plage. Si vous utilisez un interrupteur et des résistances fixes, vous pouvez contrôler la fréquence par étapes. Connecté à l'une des entrées Microcontrôleur Arduino capteur de courant, vous pouvez utiliser un programme qui réduira automatiquement la vitesse de rotation de l'arbre avec une augmentation indésirable de la charge.
Le programme, au moyen de codes spéciaux, allume le convertisseur, lit la valeur de tension et la régule. Ensuite, il donne l'ordre d'aller à la bibliothèque de l'émetteur pour générer le code et le transmettre. Lorsque la charge augmente, la tension de fonctionnement est compensée et ajustée. Deux méthodes sont utilisées pour cela : installer un gros condensateur pour l'énergie de réserve ou un convertisseur élévateur. La sortie doit être contrôlée par un stabilisateur.
C'est le principe de base de l'interaction entre les appareils électroniques, le moteur et la carte.
Avantages de l'utilisation d'un convertisseur privé sur un microcontrôleur Arduino
À l'aide d'un microcontrôleur, il permet de réaliser d'importantes économies sur les coûts d'électricité à charge partielle. Étant donné que la consommation d'électricité et la vitesse du moteur sont directement proportionnelles, les économies peuvent être importantes si elles sont utilisées correctement. Prenons l'exemple d'un système utilisant une pompe dans une station d'épuration.
Une petite entreprise privée n'a besoin de pomper une fosse que juste avant un gros orage ou lorsqu'il y a une utilisation accrue des égouts (week-ends de vacances) et n'a pas besoin d'une capacité de pompage complète. Si la pompe fonctionne en permanence, l'entreprise dépensera une quantité importante d'électricité pour le fonctionnement de la pompe à pleine capacité.L'essentiel est que, en fonction de la pression dans le système d'égouts et de drainage, la pompe accélère en douceur et maintient la pression nécessaire dans le système avec régulation du régime moteur .
Donc banc d'écoleéquation simple connue :
Puissance = couple x vitesse angulaire.
Pour une configuration de moteur spécifique, la puissance est une valeur constante. Lorsque la vitesse angulaire augmente, le couple diminue. Ainsi, le couple est plus important à bas régime, et inversement.
Dû en utilisant Arduino Ainsi, il est possible de ralentir le moteur de la pompe jusqu'à 50%, tout en pompant un grand volume d'eau, et ainsi économiser plus de 50% de l'électricité nécessaire. Les économies seront tout simplement astronomiques avec une utilisation partielle ou régulière du convertisseur.
Contrôler la vitesse d'un moteur asynchrone monophasé à l'aide d'Arduino
Vous devez d'abord essayer d'en savoir plus sur les caractéristiques du moteur. Ils sont différents et les façons de les gérer sont également différentes.
Il existe trois manières de contrôler la vitesse d'un moteur asynchrone :
- changement de glissement (uniquement les moteurs avec un rotor de phase);
- changement du nombre de paires de pôles ;
- changer la fréquence de l'alimentation.
Le convertisseur de fréquence est nécessaire pour assurer le contrôle normal des processus qui nécessitent une régulation. Les démarreurs (démarreurs progressifs, démarreurs progressifs) réduisent les charges de choc de la tension secteur en utilisant une méthode d'impulsion de phase (PPI) pour alimenter un moteur électrique. Comme un gradateur, ils assurent une augmentation en douceur de la consommation de courant du moteur électrique et empêchent le développement d'un court-circuit dans le réseau d'alimentation lors du démarrage.
Une fois que le moteur a été accéléré à partir du démarreur progressif, le moteur passe simplement complètement à l'alimentation secteur, puisque le démarreur progressif est synchronisé avec le secteur. Cela ne fonctionnera pas d'utiliser le FIS pour le contrôle total du moteur électrique, seulement dans certains cas, il peut «rouler».
Si un onduleur est un plaisir coûteux pour vous, vous pouvez essayer la méthode classique de réglage de l'alimentation en air - contrôler une vanne à tiroir à partir d'un servomoteur. Ici, l'accent est mis sur la mécanique. En fait, le moteur électrique lui-même avec cette méthode fonctionnera toujours à sa valeur nominale.
Ingénierie créativité
Comment faire Convertisseur de fréquence de vos propres mains ? Vous pouvez parcourir Internet pour trouver les meilleures sources d'information sur le thème de l'artisanat et ne pas trouver une seule réponse spécifique à votre question, car chaque projet nécessite des composants différents, mais il existe principe général motif. Ici, vous en aurez besoin.
Commençons par déterminer ce que vous voulez faire avec votre schéma. Divisez la tâche en tâches simples pour chaque composant électronique pouvant être complété. Au cours de votre exploration, vous rencontrerez une gamme de conceptions qui vous aideront à voir les forces et les faiblesses de chacune des conceptions que vous trouvez intéressantes et liées à votre problème.
Il est préférable de commencer par les moteurs et de travailler à rebours pour créer un processeur de contrôle moteur. Vous devez sélectionner le moteur en fonction du couple, de la vitesse et de la puissance requis.
Il s'agit d'un travail électrique qui nécessite une connaissance approfondie de l'électricité. Cela dépend en grande partie de la profondeur à laquelle vous voulez connaître la théorie, il ne suffit pas de connaître les composants. Concevoir un circuit consiste à calculer des tensions et des courants, à choisir les bonnes pièces. Le résultat de la conception est une spécification des équipements et des matériaux.La connaissance des éléments exacts de la spécification dont vous avez besoin ne vient qu'avec l'expérience.
Vous devrez effectuer une analyse de circuit pour déterminer les composants requis de votre spécification, y compris min./max. calculs de tolérance et de température. Sur la base des données initiales du moteur électrique, un schéma fonctionnel est établi et les composants électroniques sont sélectionnés. A titre d'exemple, nous présentons une liste des principaux éléments d'un entraînement électrique fait maison 5-200Hz (10-400Hz):
Parcourir tous les articles Caractéristiques spécifié par le fabricant. Effectuez des calculs thermiques et envisagez des mesures de refroidissement et de dissipation thermique si nécessaire. Bien sûr, cela nécessite de nombreuses années d'expérience pour obtenir un bon résultat. Vous pouvez également profiter des conseils et des conseils d'électriciens plus expérimentés.
En conséquence, vous obtiendrez un simulateur de mise en page.
Vous devez vous assurer que le moteur est solidement installé afin qu'il ne se précipite pas pour «marcher». Tester la disposition assemblée montrera à quel point le circuit vous permettra de prendre la vitesse du moteur électrique, de tout inverser ou d'arrêter le système. Vous pouvez utiliser les commutateurs pour ce simulateur. Soyez prêt pour le fait que vous devez refaire le système. Ne réinventez pas la roue. La sagesse a raison de pouvoir utiliser ce que d'autres maîtrisent ou même d'améliorer l'invention de quelqu'un d'autre.
Essayez différents composants du circuit. Utilisez un multimètre pour obtenir des résultats. Au bout d'un moment, vous serez en mesure de dire avec conviction pourquoi vous utilisez une résistance de 2W au lieu d'une de 0,25W.
La plupart des fabricants de semi-conducteurs vendent des cartes d'évaluation avec leurs produits. N'en achetez pas un, plus pour l'étude. L'ingénierie consiste à faire beaucoup d'erreurs, à l'exception d'un choc électrique ou d'un incendie.
Pour chaque sous-étape, faites un diagramme et obtenez le résultat. Connectez les pièces de sorte que les sorties d'un circuit servent d'entrées pour le suivant. Travail supplémentaire pour le génie artistique. Soit dit en passant, c'est la même procédure que celle que l'on utiliserait pour écrire un programme ou un algorithme.
Le variateur développé se distingue en effet par son coût minimum, la présence de la protection nécessaire, son efficacité et sa flexibilité de conception. La LED est un bon indicateur de défauts. Il clignote lorsque le système est en configuration, surchargé, etc. Le programme du microcontrôleur prend en compte toutes sortes de situations. Automatisation complète du processus technologique avec une consommation d'énergie économique.
Mais gardez à l'esprit que vous venez de terminer une étape du processus de conception. Dans le monde réel de la conception, il semble qu'aucun d'entre nous n'entre dans les détails de la spécification, du schéma, de l'analyse et de tout le reste. En ce qui concerne les projets, en règle générale, il n'y a pas de limite à l'amélioration. Seules certaines œuvres peuvent être réutilisées.
Conclusion
Lorsque les convertisseurs privés ont été introduits pour la première fois, les raisons étaient peut-être différentes de ce qu'elles sont maintenant. Dans les conditions modernes, c'est:
- démarrage en douceur du moteur électrique ;
- économie d'énergie;
- fluidité du processus.
Prenons un petit pipeline comme exemple. La manière traditionnelle, lorsqu'il est nécessaire d'accélérer le processus de changement, consiste d'abord à arrêter le processus. Si vous prenez l'ancien mécanisme et en installez un nouveau, cela peut facilement économiser du temps et de l'énergie.
En plus des raisons ci-dessus, les fonctions du convertisseur peuvent maintenant être programmées pour une application spécifique. À l'aide du système, vous pouvez simplement régler la vitesse dans la plage de base. Et un contrôle plus précis. Le convertisseur de fréquence peut être utilisé pour convertir courant continu en courant alternatif triphasé avec les meilleures performances de couple.
Si vous voulez acquérir beaucoup d'expérience, vous pouvez essayer de créer vous-même un circuit de commande de moteur, google pour vous aider. Le sujet est très difficile, il y a de l'électronique et de la programmation, même des mathématiques seront rencontrées.En règle générale, ceux qui traitent sérieusement de ce sujet ont peu de chances de partager le circuit. Une chose peut être dite, après avoir maîtrisé ce sujet, vous ne vous considérerez plus comme un débutant en électronique et en programmation de microcontrôleurs.
24.02.2016
![]()
Best-seller
Il vous permet de contrôler les moteurs sans perte de puissance.La condition préalable à cela est la présence d'un tachymètre (générateur tachymétrique) sur le moteur électrique, qui vous permet de fournir un retour du moteur à la carte de réglage, à savoir avec le microcircuit. Parler plus langage clair Pour que ce soit clair pour tout le monde, quelque chose comme ça se produit. Le moteur tourne avec un certain nombre de tours et le tachymètre installé sur l'arbre du moteur enregistre ces lectures. Si vous commencez à charger le moteur, la vitesse de l'arbre commencera naturellement à baisser, ce qui sera également fixé par le tachymètre. Maintenant regardons plus loin. Le signal de ce tachymètre va au microcircuit, il le voit et ordonne aux éléments de puissance d'ajouter de la tension au moteur électrique.Ainsi, lorsque vous appuyez sur l'arbre (donnez une charge), la carte ajoute automatiquement la tension et la puissance sur ce arbre augmenté. Et vice versa, lâchez l'arbre du moteur (ils en ont retiré la charge), elle l'a vu et a réduit la tension. Ainsi, la vitesse ne reste pas faible, mais le moment de force (couple) est constant. Et surtout, vous pouvez régler la vitesse du rotor dans une large plage, ce qui est très pratique dans l'application et la conception de divers appareils. Par conséquent, ce produit s'appelle "Carte de contrôle de vitesse moteurs à collecteur sans perte de puissance.
Mais nous avons vu une caractéristique que cette carte n'est applicable que pour les moteurs à collecteur (avec balais électriques). Bien sûr, de tels moteurs dans la vie quotidienne sont beaucoup moins courants que les moteurs asynchrones. Mais ils sont largement utilisés dans les machines à laver automatiques. C'est exactement pourquoi ce schéma a été créé. Surtout pour le moteur électrique de la machine à laver. Leur puissance est tout à fait correcte, de 200 à 800 watts. Cela leur permet d'être largement utilisés dans la vie de tous les jours.
Ce produit a déjà trouvé une large application dans l'économie des personnes et a largement couvert les personnes impliquées dans divers passe-temps et activités professionnelles.
Répondre à la question - Où puis-je utiliser le moteur de la machine à laver ? Une liste a été constituée. Tour à bois fait maison; Broyeur; Entraînement électrique pour bétonnière ; Taille crayon; Entraînement électrique pour extracteur de miel ; coupe-paille; Tour de potier fait maison; tondeuse à gazon électrique; Fendeuse à bois et bien plus encore là où la rotation mécanique de tout mécanisme ou objet est nécessaire. Et dans tous ces cas, cette carte "Réglage de la vitesse des moteurs électriques avec maintien de puissance sur le TDA1085" nous aide.
Carte de contrôle de vitesse de test de collision
Il vous permet de contrôler les moteurs sans perte de puissance.La condition préalable à cela est la présence d'un tachymètre (générateur tachymétrique) sur le moteur électrique, qui vous permet de fournir un retour du moteur à la carte de réglage, à savoir avec le microcircuit. En termes plus simples, pour que tout le monde puisse comprendre, quelque chose comme ce qui suit se produit. Le moteur tourne avec un certain nombre de tours et le tachymètre installé sur l'arbre du moteur enregistre ces lectures. Si vous commencez à charger le moteur, la vitesse de l'arbre commencera naturellement à baisser, ce qui sera également fixé par le tachymètre. Maintenant regardons plus loin. Le signal de ce tachymètre va au microcircuit, il le voit et ordonne aux éléments de puissance d'ajouter de la tension au moteur électrique.Ainsi, lorsque vous appuyez sur l'arbre (donnez une charge), la carte ajoute automatiquement la tension et la puissance sur ce arbre augmenté. Et vice versa, lâchez l'arbre du moteur (ils en ont retiré la charge), elle l'a vu et a réduit la tension. Ainsi, la vitesse ne reste pas faible, mais le moment de force (couple) est constant. Et surtout, vous pouvez régler la vitesse du rotor dans une large plage, ce qui est très pratique dans l'application et la conception de divers appareils. Par conséquent, ce produit s'appelle "Carte de commande de révolution pour moteurs à collecteur sans perte de puissance".
Mais nous avons vu une caractéristique que cette carte n'est applicable que pour les moteurs à collecteur (avec balais électriques). Bien sûr, de tels moteurs dans la vie quotidienne sont beaucoup moins courants que les moteurs asynchrones. Mais ils sont largement utilisés dans les machines à laver automatiques. C'est exactement pourquoi ce schéma a été créé. Surtout pour le moteur électrique de la machine à laver. Leur puissance est tout à fait correcte, de 200 à 800 watts. Cela leur permet d'être largement utilisés dans la vie de tous les jours.
Ce produit a déjà trouvé une large application dans l'économie des personnes et a largement couvert les personnes impliquées dans divers passe-temps et activités professionnelles.
Répondre à la question - Où puis-je utiliser le moteur de la machine à laver ? Une liste a été constituée. Tour à bois fait maison; Broyeur; Entraînement électrique pour bétonnière ; Taille crayon; Entraînement électrique pour extracteur de miel ; coupe-paille; Tour de potier fait maison; tondeuse à gazon électrique; Fendeuse à bois et bien plus encore là où la rotation mécanique de tout mécanisme ou objet est nécessaire. Et dans tous ces cas, cette carte "Réglage de la vitesse des moteurs électriques avec maintien de puissance sur le TDA1085" nous aide.
Carte de contrôle de vitesse de test de collision
Il y a des moteurs dans presque tous les robots. Dans certains robots, ils actionnent les roues, faisant avancer la voiture dans la bonne direction. Dans d'autres, les moteurs font tourner les hélices, créant une poussée verticale pour le vol. Les moteurs permettent aux articulations d'un bras robotique industriel de tourner et de déplacer le chariot de l'imprimante 3D. En général, un robot ne peut être fabriqué sans un bon moteur.
Il existe de nombreux types de moteurs. Les plus courants en robotique comprennent un moteur à courant continu, moteur pas à pas, et un moteur sans balais. Chaque type a ses propres caractéristiques, avantages et inconvénients. Certains sont plus adaptés à des mouvements précis, d'autres facilitent le transport du multicoptère dans le ciel. Pour chaque projet, vous devez sélectionner avec soin le bon type de moteur.
Dans cette leçon, nous allons apprendre à contrôler un moteur à courant continu. Les moteurs de ce type de pièce sont utilisés dans les robots sur des plates-formes à roues et à chenilles. Et nous allons commencer par le tout moyen facile le management.
1.Transistor
Tout roboticien débutant est confronté au problème de la connexion d'un moteur à un microcontrôleur. Après passage, il semble que l'on puisse faire la même chose avec le moteur : le brancher sur les sorties digitales Arduino, puis allumez-le et éteignez-le selon le programme. Mais ce n'était pas là. Même un petit moteur, souvent utilisé dans divers types de jouets, nécessite un courant de 200 mA à 1 Ampère pour son fonctionnement. Et la sortie numérique Arduino ne peut nous donner que 20mA. Les moteurs les plus puissants nécessitent plus que les 5 volts auxquels l'Arduino est habitué. Les moteurs courants sont de 12, 24 et 48 volts. En d'autres termes, l'Arduino est très faible pour le contrôle direct du moteur. Nous avons besoin d'une sorte d'intermédiaire puissant !
L'intermédiaire le plus simple est un transistor. Transistors adaptés et à effet de champ, et bipolaires, fonctionnant en mode clé. Ci-dessous, un circuit de commande de moteur utilisant un transistor NPN bipolaire.
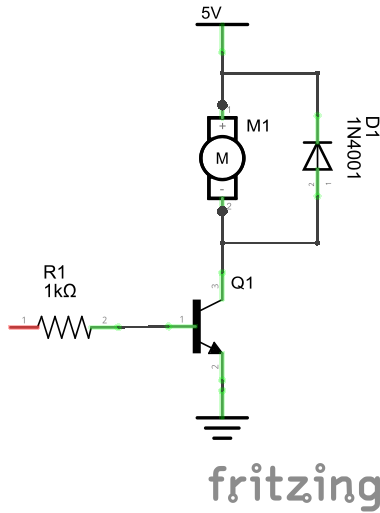
Comme vous pouvez le voir, le schéma est très simple. Nous envoyons un signal faible de l'Arduino à la base du transistor via une résistance de 1kΩ, à la suite de quoi le transistor ouvre un canal puissant à travers lequel le courant circule de plus en moins à travers le moteur. En fait, nous avons reçu une primitive conducteur de moteur!
Il est impératif de mettre une diode de protection dans le circuit, par exemple 1N4001 ou 1N4007. Cette diode ne permettra pas au transistor et au contrôleur de griller au moment où le moteur s'arrête, lorsque l'EMF d'auto-induction crée une surtension sur les enroulements.
Dans ce circuit, on peut utiliser, par exemple, un transistor NPN 2N2222A. Ce transistor bipolaire peut conduire un courant jusqu'à 1A et une tension jusqu'à 40V, il peut donc être tout à fait utilisé pour les petits moteurs. L'analogue russe de ce transistor est KT315.
Avec un seul transistor, nous pouvons allumer et éteindre un moteur à courant continu dans une direction. Mais le robot à roues doit se déplacer dans un sens et dans l'autre. Ce qu'il faut faire? Vous avez besoin d'un pilote plus avancé.
2. Pont en H
En composant les transistors d'une certaine manière, nous obtiendrons un dispositif de contrôle de la rotation du moteur dans les deux sens. Un tel appareil s'appelle Pont en H. Voici à quoi ressemble le pont en H sur les transistors bipolaires :
INA et INB sur la figure sont l'entrée de signaux de commande faibles. Dans le cas d'Arduino, ils doivent être alimentés soit en 0 (masse) soit en + 5V. VCC est l'alimentation des moteurs, elle peut être plusieurs fois supérieure à la tension du signal de commande. GND est la masse commune entre l'Arduino et le pont en H.
Selon laquelle des entrées nous appliquons un signal positif, le moteur tournera dans un sens ou dans l'autre. En règle générale, en plus du pont en H lui-même, des diodes de protection, des filtres, des optocoupleurs et d'autres améliorations sont ajoutés au circuit de commande du moteur à courant continu.
3. Puce pilote L293D
Bien entendu, il n'est pas nécessaire d'assembler manuellement le pilote de moteur à partir de transistors individuels. Il existe de nombreux microcircuits prêts à l'emploi qui vous permettent de contrôler différents types de moteurs. Nous considérons le commun Pilote L293D.
Le microcircuit se compose de deux ponts en H, ce qui signifie que deux moteurs peuvent être contrôlés à la fois. Chaque pont est équipé de quatre diodes de protection et d'une protection contre la surchauffe. Le courant maximum que le L293D peut transférer au moteur est de 1,2 A. Courant de fonctionnement - 600mA. La tension maximale est de 36 V.
4. Connexion
La puce L293D possède un boîtier DIP à 16 broches. Schéma de sortie ci-dessous.
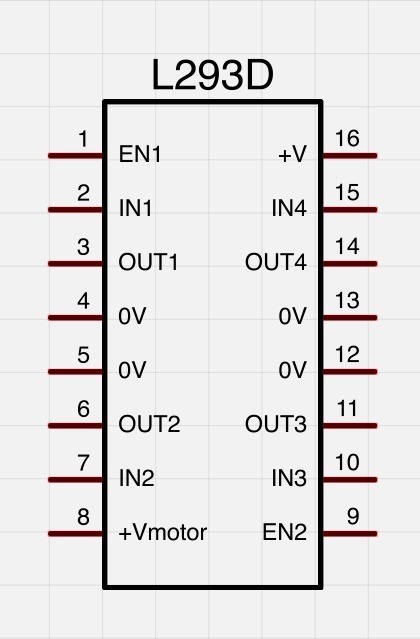
N'oubliez pas que les broches sont comptées dans le sens antihoraire et commencent à partir de l'évidement du boîtier du microcircuit.
- + V - microcircuit de puissance, 5V;
- + Vmotor - alimentation pour moteurs, jusqu'à 36V;
- 0V - masse ;
- En1, En2 - Sorties marche/arrêt du pont en H ;
- In1, In2 - sorties de contrôle du premier pont en H;
- Out1, Out2 - sorties pour connecter le premier moteur;
- In3, In4 - sorties de contrôle du deuxième pont en H;
- Out3, Out4 - sorties pour connecter le deuxième moteur.
Les broches En1 et En2 sont utilisées pour désactiver ou activer les ponts. Si on applique 0 à En, le pont correspondant est complètement éteint et le moteur s'arrête de tourner. Ces signaux nous seront utiles pour contrôler la poussée du moteur à l'aide d'un signal PWM.
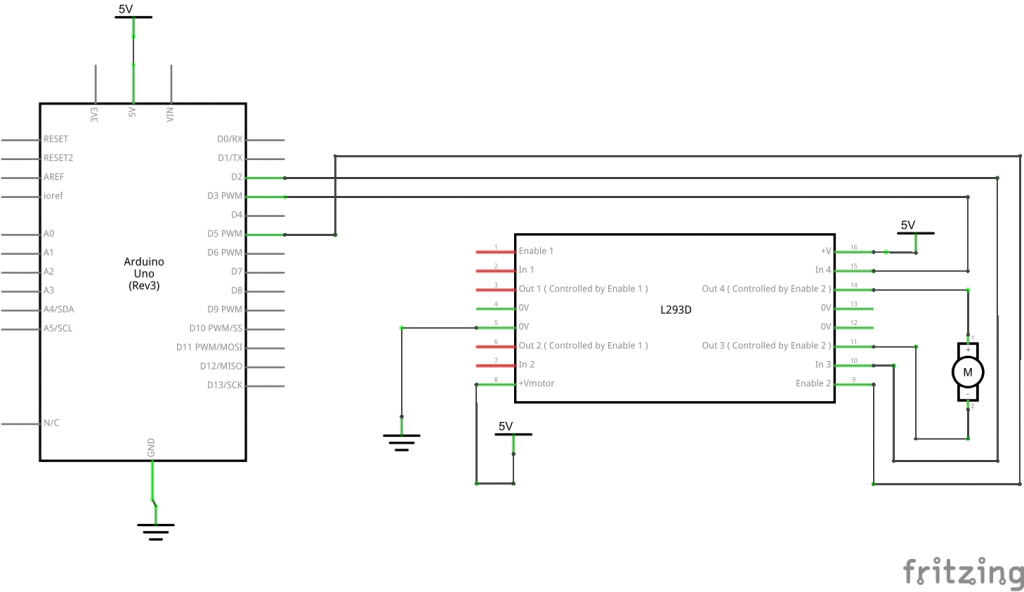
Schéma de câblage pour Arduino Uno
| Pilote L293D | En 1 | En 2 | En3 | En4 | En1 | Fr2 | V+ | Vmoteur+ | 0V |
| Arduino Uno | 7 | 8 | 2 | 3 | 6 | 5 | +5V | +5V | Terre |
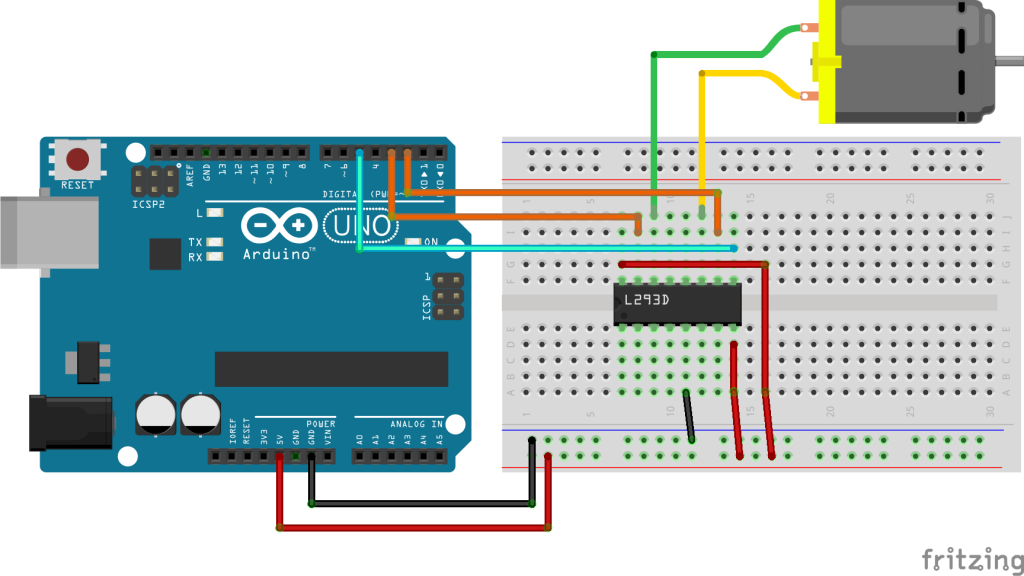
Par exemple, connectons un seul moteur selon ce schéma. Nous utilisons les broches de pilote In3, In4 et En2. Le schéma de câblage ressemblera à ceci :
Apparence de la mise en page
5. Programme
Écrivons un programme simple qui fera tourner le moteur en changeant de direction à chaque seconde.
Const in3 = 2 ; const entier in4 = 3 ; const entier en2 = 5 ; void setup() ( pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); pinMode(en2, OUTPUT); analogWrite(en2, 255); ) void loop() ( digitalWrite(in3, LOW); digitalWrite(in4, ÉLEVÉ ); retard (1000); écriture numérique (in3, HIGH); écriture numérique (in4, LOW); retard (1000); )
Une fonction analogiqueÉcritureà l'aide d'un signal PWM, il contrôle la puissance du moteur. Dans ce programme, nous disons au conducteur de faire tourner le moteur à la vitesse maximale, ce qui correspond à un signal PWM de 255. Il convient de noter ici que réduire de moitié le signal PWM ne donnera pas la moitié de la vitesse. La vitesse et la poussée des moteurs à courant continu dépendent de la tension d'entrée de manière non linéaire.
Compliquons maintenant le programme. En plus de la direction, nous allons également changer la puissance.
Const in3 = 2 ; const entier in4 = 3 ; const entier en2 = 5 ; void setup() ( pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); pinMode(en2, OUTPUT); ) void loop() ( digitalWrite(in3, HIGH); digitalWrite(in4, LOW); analogWrite(en2, 150); delay(2000); analogWrite(en2, 255); delay(2000); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); analogWrite(en2, 150); delay(2000); analogWrite(en2, 255); retard (2000); )
Voici ce qui se passe à la fin. Tout d'abord, le moteur tourne à basse vitesse, puis atteint la vitesse maximale et répète tout dans le sens opposé. Dans la vidéo, nous faisons tourner un moteur à courant continu CH1 commun avec une roue. Ceux-ci sont souvent utilisés dans les robots éducatifs.
Tâches
Maintenant qu'il est devenu un peu plus clair comment contrôler les moteurs à courant continu conventionnels, essayons d'effectuer plusieurs tâches basées sur le robot le plus simple sur deux roues.
- Assemblez un pilote basé sur un transistor NPN et faites tourner le moteur avec.
- Contrôlez deux moteurs à la fois à l'aide du L293D, en leur transférant une puissance différente.
- Assemblez un robot à roues et faites-le se déplacer en cercle.
- Faites bouger le robot à roues en spirale.
Dans la prochaine leçon sur le thème des moteurs, nous étudierons le fonctionnement des encodeurs, ce qui nous permettra de rendre le contrôle plus précis et nous aidera à fabriquer un servo de nos propres mains.
Cet article couvre la manière la plus simple de connecter un moteur à courant continu à un Arduino.
Introduction
Les moteurs à courant continu ne peuvent pas être connectés directement à l'Arduino. Cela est dû au fait que les broches ne sont pas capables de délivrer plus de 40 mA. Le moteur, selon la charge, a besoin de plusieurs centaines de milliampères. Il faut donc augmenter la puissance. Cela se fait, en règle générale, à l'aide de transistors.
Dans l'article " Transistors"Vous pouvez vous familiariser avec les principaux types de transistors et leurs principes de fonctionnement.
Également recommandé de regarder : Tutoriels vidéo Arduino, série 5 - Moteurs et transistors. Dans ce tutoriel, Jeremy Blume parle de connecter un moteur à courant continu à un Arduino via un transistor bipolaire.
Composants requis
Nous considérerons l'option d'interaction avec un transistor à effet de champ. Les principes de connexion du moteur seront démontés sur un matériel spécifique : moteur à courant continu, carte Arduino, transistor à effet de champ canal N, résistance 10 kOhm ( R1), résistance 220 ohms ( R2).
Vous êtes libre d'utiliser ce qui est disponible dans vos expériences. Seules 3 conditions sont importantes :
La consommation de courant maximale du moteur (courant de blocage) ne doit pas dépasser le courant de drain maximal du FET.
La grille du transistor doit être déverrouillée à une tension de 5 V.
Le transistor doit avoir une diode flyback intégrée.
Schéma de câblage
En fait, le bobinage du moteur est un inducteur. Lorsqu'une tension est appliquée, une force électromotrice inverse se produit, ce qui peut détruire le transistor. La diode flyback est installée dans le sens inverse et empêche les fuites de courant du moteur vers le transistor. Par conséquent, si le transistor n'a pas de diode flyback, il faut l'installer en plus : l'anode à la source, la cathode au drain.
Le transistor IRF530N est puissant et est livré dans un boîtier TO-220. Ci-dessous son brochage.
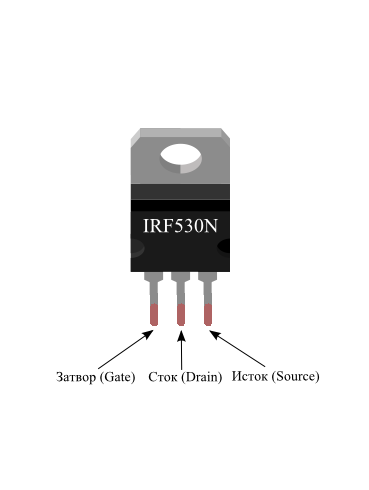
Dans ce circuit, le transistor fonctionnera en mode clé : sur une commande (réglage du niveau HAUT sur la grille) de l'Arduino, le transistor connectera le moteur à la source d'alimentation (déverrouillage), sur l'autre commande (réglage du Niveau BAS sur le portail) - éteignez le moteur de la source d'alimentation.
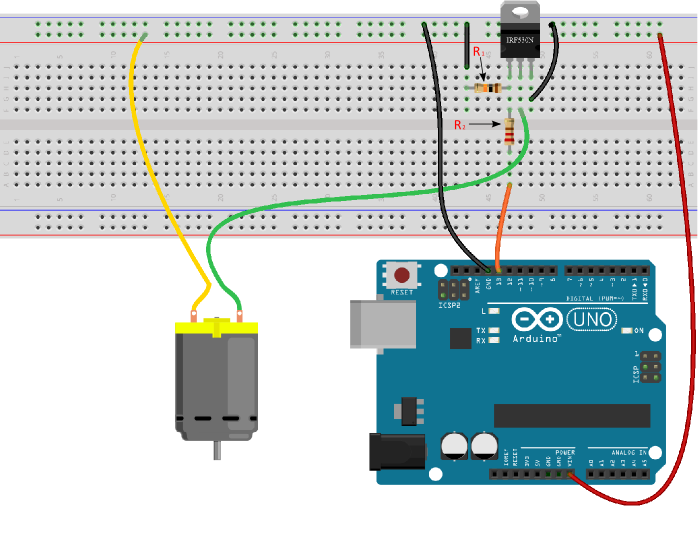
La résistance R1 tire la grille du transistor à la masse. La note n'est pas importante - vous pouvez utiliser n'importe quelle résistance dans la plage de 1 à 10 kOhm. La résistance R2 sert à protéger la broche du microcontrôleur. La plage est d'environ 10 à 500 ohms.
Pour alimenter ce circuit, vous pouvez connecter une alimentation externe 6-9V à l'Arduino, ou alimenter directement la planche à pain (le bus bleu est négatif, le bus rouge est positif).
La programmation
Pour la plus grande simplicité, nous utiliserons peut-être le croquis le plus célèbre d'exemples prêts à l'emploi - Cligner.
Blink.ino led int = 13 ; void setup()( // Initialiser la broche numérique 13 à la sortie pinMode(led, SORTIE) ; ) void loop() ( digitalWrite(led, HIGH) ; // Allumer la LED et le moteur retard(1000) ; // Retard de 1 seconde digitalWrite(led, LOW) ; // Éteignez la LED et le moteur retard(1000) ; // Retard de 1 seconde }Voyons ce qui se passe.
La broche numérique change d'état 13 fois par seconde. Lorsque la sortie est réglée sur HIGH, la LED s'allume et le moteur commence à tourner. Lorsque LOW est réglé, la LED s'éteint et le moteur s'arrête.
résultats
Il était possible de connecter des appareils puissants aux broches Arduino, en particulier des moteurs à courant continu.
Utilisation de PWM pour contrôler la vitesse du moteur
Si un moteur n'est pas plus difficile à contrôler qu'une LED, alors il est probablement possible de modifier la luminosité de la vitesse de rotation du moteur de la même manière que lorsque l'on travaille avec des LED ? Exactement! Du point de vue de l'Arduino, peu importe à quoi nous avons affaire.
Comme vous l'avez probablement déjà deviné, pour modifier la vitesse de rotation du moteur, nous avons besoin d'un croquis Disparaître.
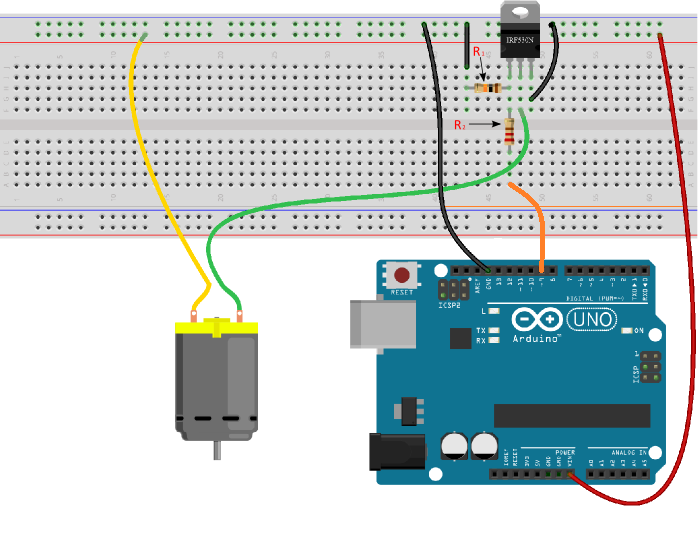
Fade.ino int led = 9 ; // Broche à laquelle la grille du transistor est connectée int luminosité = 0 ; // Maintenant cette variable est responsable de la vitesse de rotation int fadeAmount = 5 ; // Pas de changement de vitesse void setup()( // Définissez la broche numérique 9 sur la sortie pinMode(led, SORTIE) ; ) vider la boucle() ( // Définir la vitesse du moteur analogWrite(led, luminosité) ; // Augmente la valeur actuelle de la vitesse de rotation luminosité = luminosité + fadeAmount ; // Lorsque la vitesse devient maximale/minimale, on commence à la réduire/augmenter if (luminosité == 0 || luminosité == 255 ) ( fadeAmount = - fadeAmount ; ) // Pause de 30 millisecondes retard(30) ; )Schéma de câblage
Pour utiliser les capacités de la fonction analogWrite(..), nous devrons basculer sur l'une des broches (3/5/6/9/10/11) prenant en charge le matériel PWM. Parce que, par défaut, dans l'esquisse Disparaître la 9ème broche est en cause, nous arrêterons notre choix dessus.
Résultat
Il était possible de modifier la vitesse de rotation du moteur à l'aide du matériel Arduino PWM.
Où cet article se termine. Vous pouvez désormais utiliser en toute sécurité des moteurs à courant continu dans vos projets !

