24.02.2016
![]()
베스트셀러
이를 통해 전력 손실 없이 모터를 제어할 수 있습니다.이를 위한 전제 조건은 전기 모터에 회전 속도계(회전 속도계)가 있어야 모터에서 조정 보드, 즉 미세 회로로 피드백을 제공할 수 있다는 것입니다. 더 말하기 평범한 언어모든 사람에게 명확하게 하기 위해 이와 같은 일이 발생합니다. 모터는 특정 회전수로 회전하고 모터 샤프트에 설치된 회전 속도계는 이러한 판독값을 기록합니다. 엔진에 부하를 가하기 시작하면 샤프트 속도가 자연스럽게 떨어지기 시작하며 이 속도도 회전 속도계에 의해 고정됩니다. 이제 더 살펴보겠습니다. 이 타코미터의 신호는 미세 회로로 이동하고 이를 보고 전력 요소에 전기 모터에 전압을 추가하도록 지시합니다.따라서 샤프트를 누르면(부하를 가) 보드가 자동으로 전압을 추가하고 여기에 전원이 공급됩니다. 샤프트가 증가했습니다. 그리고 그 반대의 경우도 마찬가지입니다. 모터 샤프트에서 손을 떼면(부하가 제거됨) 그녀는 이것을 보고 전압을 줄였습니다. 따라서 속도는 낮게 유지되지 않지만 힘의 모멘트(토크)는 일정합니다. 그리고 가장 중요한 것은 로터의 속도를 넓은 범위로 조절할 수 있어 다양한 기기의 적용 및 설계에 매우 편리합니다. 따라서 이 제품을 "전력 손실 없는 집전 모터용 회전 제어 보드"라고 합니다.
비례 게인을 줄이면 응답이 느려지고 과도한 비례 게인으로 인한 과변조 및 혼선이 줄어듭니다. 비례 게인과 적분 게인을 가깝게 조정하면 과변조 조건도 발생할 수 있습니다. 0으로 설정하면 적분 보상이 제거되어 비례 속도가 됩니다. 이 선택은 과도한 변조를 피하고 상당한 "경도"가 필요하지 않은 시스템에 이상적입니다.
그러나 우리는 이 보드가 정류자 모터(전동 브러시 포함)에만 적용할 수 있는 한 가지 기능을 보았습니다. 물론 일상 생활에서 이러한 모터는 비동기식 모터보다 훨씬 덜 일반적입니다. 그러나 그들은 자동 세탁기에 널리 사용됩니다. 이것이 바로 이 계획이 만들어진 이유입니다. 특히 세탁기의 전기 모터의 경우. 그들의 전력은 200에서 800와트까지 꽤 괜찮습니다. 일상 생활에서 널리 사용할 수 있습니다.
이 기능을 사용하면 속도를 매우 정밀하게 제어할 수 있으며 정확도는 사용된 변환기 유형에 따라 달라집니다. 제어 및 전원 단계를 분리하지 않습니다. 토크 컨트롤러에 대한 토크 참조를 제공합니다. 속도 매개변수 설정을 허용합니다.
모듈의 각 출력을 활성화하는 선택 점퍼가 있습니다. 단락이 발생하여 모듈이 손상될 수 있습니다. 프로그램은 기본적으로 한 방향으로 4초 동안 모터를 작동시킨 다음 5초 동안 모터를 정지시킨 후 반대 방향으로 4초 동안 모터를 활성화하고 마지막으로 5초 동안 모터를 정지시킵니다. 그런 다음 작업을 무기한 반복합니다.
적분 이득 값을 높이면 장치의 저주파 이득과 강성이 증가합니다. 과도한 적분 이득은 에지의 속도 제어를 과변조하고 진동을 유발할 수 있습니다. 일반적인 튜닝은 1~4Hz입니다. 속도 제어를 수동으로 조정하려면 오실로스코프로 측정값 신호를 관찰하면서 다음과 같이 진행하십시오. 적분 이득은 최소로 유지되어야 합니다. 최소한의 차동 이득. 제어 값의 단계 요소에 대한 적절한 응답을 얻을 때까지 매개변수를 조정합니다.
이 제품은 이미 사람들의 경제에서 널리 응용되고 있으며 다양한 취미 및 전문 활동에 관련된 사람들을 광범위하게 포함하고 있습니다.
질문에 답하기 - 세탁기의 엔진을 어디에서 사용할 수 있습니까? 목록이 구성되었습니다. 수제 나무 선반; 분쇄기; 콘크리트 믹서용 전동 드라이브; 가는 사람; 꿀 추출기용 전기 구동; 밀짚 절단기; 집에서 만든 녹로; 전기 잔디 깎는 기계; 나무 쪼개는 도구 및 기타 메커니즘이나 물체의 기계적 회전이 필요한 경우. 그리고 이 모든 경우에 이 보드 "TDA1085의 전원을 유지하면서 전기 모터의 속도 조정"이 도움이 됩니다.
바이폴라 스테퍼 모터 제어
스테퍼 모터는 양극성 또는 단극성일 수 있습니다. 이 예에서 우리는 바이폴라 스테퍼 모터로 작업하고 있지만 이 드라이버는 모터 코일의 중앙 보스에 있는 케이블을 우회하는 바이폴라 구성으로 연결될 때 단극 스테퍼 모터를 구동할 수 있습니다. 최대 허용 전력은 2암페어입니다.
각 모터 코일은 모듈의 출력에 연결됩니다. 스테퍼 모터 코일을 식별하기 위해 연속 모드에서 멀티미터를 사용합니다. 연속성 케이블은 각 코일의 끝입니다. 이 값은 기술 사양엔진 데이터 시트. 리뷰 Luis del Valle Hernandez.
장치의 강성 증가를 증가시킵니다. 오실로스코프를 사용하여 피드백 응답 단계를 모니터링하는 것이 편리합니다. 다음 그림은 다양한 게인 설정에서 오실로스코프에 피드백 응답이 어떻게 나타나는지 보여줍니다. 그림 2-28은 적분 이득이 0Hz로 정의될 때 속도 비례 루프의 응답을 보여줍니다. 그러나 비례 게인 값이 너무 낮습니다.
무화과에. 그림 2-29는 과도한 비례 이득의 예입니다. 프로세스 피드백 응답의 과도 진동에 주목하십시오. 그림 2-30은 이 특정 시스템에 대한 최적의 응답을 보여줍니다. 그림 2-31에서 적분 게인이 비례 게인 값에 비해 너무 높게 설정되었습니다. 그 결과 과도 진동과 과도한 과변조가 발생합니다. 그렇기 때문에 비례 이득프로세스 게인을 높이거나 적분 프로세스 게인을 줄여야 합니다.
충돌 테스트 속도 제어 보드
이를 통해 전력 손실 없이 모터를 제어할 수 있습니다.이를 위한 전제 조건은 전기 모터에 회전 속도계(회전 속도계)가 있어야 모터에서 조정 보드, 즉 미세 회로로 피드백을 제공할 수 있다는 것입니다. 모든 사람이 이해할 수 있도록 더 쉽게 말하면 다음과 같은 일이 일어납니다. 모터는 특정 회전수로 회전하고 모터 샤프트에 설치된 회전 속도계는 이러한 판독값을 기록합니다. 엔진에 부하를 가하기 시작하면 샤프트 속도가 자연스럽게 떨어지기 시작하며 이 속도도 회전 속도계에 의해 고정됩니다. 이제 더 살펴보겠습니다. 이 회전 속도계의 신호는 미세 회로로 이동하고 이를 보고 전력 요소에 전기 모터에 전압을 추가하도록 지시합니다.따라서 샤프트를 누르면(부하를 주면) 보드가 자동으로 전압을 추가하고 여기에 전원이 공급됩니다. 샤프트가 증가했습니다. 그리고 그 반대의 경우도 마찬가지입니다. 모터 샤프트에서 손을 떼면(부하가 제거됨) 그녀는 이것을 보고 전압을 줄였습니다. 따라서 속도는 낮게 유지되지 않지만 힘의 모멘트(토크)는 일정합니다. 그리고 가장 중요한 것은 로터의 속도를 넓은 범위로 조절할 수 있어 다양한 기기의 적용 및 설계에 매우 편리합니다. 따라서 이 제품을 "전력 손실 없는 집전 모터용 회전 제어 보드"라고 합니다.
전력 스테이지는 두 부분으로 나눌 수 있습니다. 트랜지스터로 구현된 전력 표준은 저에너지 애플리케이션에 사용되며 위치 제어 케이스와 같은 매우 빠른 동적 응답이 필요합니다. 그런 다음 사이리스터로 구현된 전력 스테이지는 일반적으로 산업 분야의 고전력 애플리케이션에 사용됩니다. 제어 단계에는 속도 컨트롤러와 토크 컨트롤러의 두 가지 주요 부분이 있습니다. 이러한 컨트롤러 각각의 올바른 설정 또는 조정은 제어 시스템을 불안정하게 만들려는 변경 사항을 로드하기 위한 제어 시스템의 최적 응답에 따라 달라집니다.
그러나 우리는 이 보드가 정류자 모터(전동 브러시 포함)에만 적용할 수 있는 한 가지 기능을 보았습니다. 물론 일상 생활에서 이러한 모터는 비동기식 모터보다 훨씬 덜 일반적입니다. 그러나 그들은 자동 세탁기에 널리 사용됩니다. 이것이 바로 이 계획이 만들어진 이유입니다. 특히 세탁기의 전기 모터의 경우. 그들의 전력은 200에서 800와트까지 꽤 괜찮습니다. 일상 생활에서 널리 사용할 수 있습니다.
이 기능을 사용하면 속도를 매우 정밀하게 제어할 수 있으며 정확도는 사용된 변환기 유형에 따라 달라집니다. 제어 및 전원 단계를 분리하지 않습니다. 토크 컨트롤러에 대한 토크 참조를 제공합니다. 속도 매개변수 설정을 허용합니다.
모듈의 각 출력을 활성화하는 선택 점퍼가 있습니다. 단락이 발생하여 모듈이 손상될 수 있습니다. 프로그램은 기본적으로 한 방향으로 4초 동안 모터를 작동시킨 다음 5초 동안 모터를 정지시킨 후 반대 방향으로 4초 동안 모터를 활성화하고 마지막으로 5초 동안 모터를 정지시킵니다. 그런 다음 작업을 무기한 반복합니다.
적분 이득 값을 높이면 장치의 저주파 이득과 강성이 증가합니다. 과도한 적분 이득은 에지의 속도 제어를 과변조하고 진동을 유발할 수 있습니다. 일반적인 튜닝은 1~4Hz입니다. 속도 제어를 수동으로 조정하려면 오실로스코프로 측정값 신호를 관찰하면서 다음과 같이 진행하십시오. 적분 이득은 최소로 유지되어야 합니다. 최소한의 차동 이득. 제어 값의 단계 요소에 대한 적절한 응답을 얻을 때까지 매개변수를 조정합니다.
이 제품은 이미 사람들의 경제에서 널리 응용되고 있으며 다양한 취미 및 전문 활동에 관련된 사람들을 광범위하게 포함하고 있습니다.
질문에 답하기 - 세탁기의 엔진을 어디에서 사용할 수 있습니까? 목록이 구성되었습니다. 수제 나무 선반; 분쇄기; 콘크리트 믹서용 전동 드라이브; 가는 사람; 꿀 추출기용 전기 구동; 밀짚 절단기; 집에서 만든 녹로; 전기 잔디 깎는 기계; 나무 쪼개는 도구 및 기타 메커니즘이나 물체의 기계적 회전이 필요한 경우. 그리고 이 모든 경우에 이 보드 "TDA1085의 전원을 유지하면서 전기 모터의 속도 조정"이 도움이 됩니다.
바이폴라 스테퍼 모터 제어
스테퍼 모터는 양극성 또는 단극성일 수 있습니다. 이 예에서 우리는 바이폴라 스테퍼 모터로 작업하고 있지만 이 드라이버는 모터 코일의 중앙 보스에 있는 케이블을 우회하는 바이폴라 구성으로 연결될 때 단극 스테퍼 모터를 구동할 수 있습니다. 최대 허용 전력은 2암페어입니다.
각 모터 코일은 모듈의 출력에 연결됩니다. 스테퍼 모터 코일을 식별하기 위해 연속 모드에서 멀티미터를 사용합니다. 연속성 케이블은 각 코일의 끝입니다. 이 값은 엔진의 기술 데이터 시트에 나와 있습니다. 리뷰 Luis del Valle Hernandez.
장치의 강성 증가를 증가시킵니다. 오실로스코프를 사용하여 피드백 응답 단계를 모니터링하는 것이 편리합니다. 다음 그림은 다양한 게인 설정에서 오실로스코프에 피드백 응답이 어떻게 나타나는지 보여줍니다. 그림 2-28은 적분 이득이 0Hz로 정의될 때 속도 비례 루프의 응답을 보여줍니다. 그러나 비례 게인 값이 너무 낮습니다.
무화과에. 그림 2-29는 과도한 비례 이득의 예입니다. 프로세스 피드백 응답의 과도 진동에 주목하십시오. 그림 2-30은 이 특정 시스템에 대한 최적의 응답을 보여줍니다. 그림 2-31에서 적분 게인이 비례 게인 값에 비해 너무 높게 설정되었습니다. 그 결과 과도 진동과 과도한 과변조가 발생합니다. 따라서 프로세스 비례 게인을 높이거나 적분 프로세스 게인을 줄여야 합니다.
충돌 테스트 속도 제어 보드
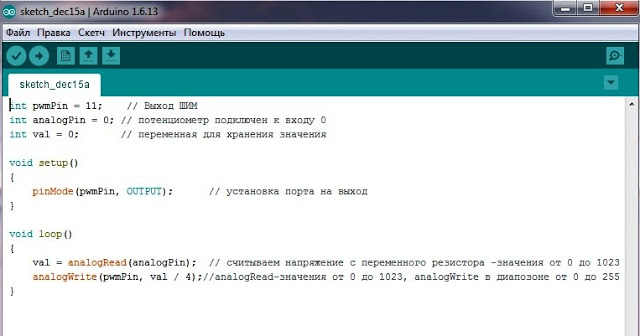
우리의 목적을 위해 가변 저항을 연결하는 데 사용하는 하나의 아날로그 입력(A0)과 하나의 PWM 출력이 필요합니다. 11을 사용하겠습니다. 간단한 회로를 조립해 보겠습니다.
이를 수행하는 가장 효율적이고 최적의 방법은 운전자를 통하는 것입니다. 우리가 무언가를 보기 시작하기 전에 이 방패가 우리에게 가져다 줄 수 있는 것에 대한 간략한 요약을 볼 것입니다. 패키지를 받고 개봉하면 가장 먼저 눈에 띄는 것은 바로 이것입니다. 이 유형의 플레이트에서는 수 또는 암 커넥터를 사용할 수 있습니다. 차이점은 무엇입니까? 무엇보다도, 그 여자는 우리가 방패를 연결하는 판의 나머지 핀을 사용할 수 있도록 허용할 것이기 때문입니다.
반면에 핀 헤더는 이것을 허용하지 않습니다. 커넥터는 이렇게 생겼습니다. 
가능한 3가지 경우를 살펴보자. 모터 실드는 단극 및 양극 스테퍼 모터를 구동할 수 있습니다. 다음은 엔진 배선입니다. 시도 할 수 있도록 보드에 부착 된 방패가 있어야 함을 기억하십시오.

그리고 11번째 PWM 출력에 연결된 LED의 밝기를 조절하는 간단한 프로그램을 작성해 보겠습니다. 아날로그 입력 A0에 연결된 가변 저항으로 조절합니다.
개발 환경을 엽니다. 이 예제와 함께 제공되는 코드를 분석해 보겠습니다. 이 세 줄은 우리가 사용할 라이브러리를 추가합니다. 예제와 같이 그대로 두면 기본 주소가 사용됩니다. 기본 주소를 변경하려면 수동으로 변경할 수 있습니다. 이러한 유형의 통신을 사용하는 다른 장치가 있는 경우 두 장치에서 반복되지 않도록 주소를 올바르게 관리하는 데 주의해야 합니다. 회전당 스텝 수는 각 모터 및 모터가 연결된 위치에 대해 표시됩니다.

우리는 첫 번째 결과를 얻습니다. 가변 저항을 사용하여 LED의 밝기가 변경됩니다. 220볼트 네트워크에 포함된 일종의 전력 부하를 제어하려면 이러한 PWM도 작동하므로 전원 장치와 Arduino 사이에 갈바닉 절연을 만드는 것이 바람직합니다. 이전 페이지에서 완성된 회로 조각을 가져올 수 있습니다.
각 단계는 도 수를 나타냅니다(예: 단계당 8도). 또한 모터를 연결한 위치를 표시해야 합니다. 이것은 1의 값을 가질 수 있는 두 번째 매개변수이며 라이브러리 예제와 관련하여 차이점을 찾을 수 있습니다. 정수를 전달하면 빈도를 변경하라는 메시지가 표시됩니다.
주파수는 각 모터에 따라 다릅니다. 매우 높은 주파수는 효율성을 감소시키고, 매우 낮은 주파수는 움직임을 연속적으로 만듭니다. 내 조언은 기본적으로 제공되는 것을 사용하고 엔진 사양에 따라 위 또는 아래로 변경하는 것입니다.

이 PWM 컨트롤러에 대한 작은 테스트를 수행했습니다. 먼저 평소와 같이 능동 부하(백열 전구)를 연결한 다음 컬렉터 모터를 연결했습니다. 모든 것이 작동합니다. 동영상 촬영 -
#define PWM_PIN 11 // PWM 출력
#define SET_PIN 0 // rpm 0-5볼트 최소-최대 설정
#define TACHO_PIN 1 // 회전 속도계의 신호 0-5볼트 최소-최대
RPM을 지정하는 정수 매개변수를 지원합니다. 슬라이더를 이동하려면 step 메서드를 호출해야 합니다. 메소드에 전달해야 하는 매개변수입니다. 이것은 일반적으로 사용되는 것은 아니지만 일반적으로 에너지를 절약하기 위해 사용됩니다. 하프 스텝이라고도 하며 해상도는 두 배이지만 속도는 절반입니다. 기계적 소음 감소 및 공진 방지에 이상적입니다. 분해능을 높이는 것이 아니라 엔진 토크를 유지합니다.
- 단계: 모터를 이동하려는 단계 수를 지정합니다.
- 이 유형은 일반적으로 웨이브 이동 또는 작은 쌍이라고 합니다.
무효 설정() (
myPID.SetMode(자동);
}
무효 루프() (
pwmOut = 제약(pwmOut, 0, 250); // 이것은 선택 사항입니다. 기본값은 0-255입니다.
pwmSet = analogRead(SET_PIN); // 속도 조정 전위차계를 읽습니다.
pwmSpeed = analogRead(TACHO_PIN); // 타코미터 판독값 읽기
myPID.Compute(); // 이것은 pid 컨트롤러 계산이 일어나는 곳입니다 - 즉, pwmOut
analogWrite(PWM_PIN, pwmOut); // PWM 출력을 얻습니다.
}
이것은 종종 전동 플랫폼이나 로봇이 사용되는 프로젝트에서 매우 유용합니다. 우리는 그것을 우리가 원하고 준비된 것에 연결하기만 하면 됩니다. 극성에 주의해야 합니다. 우리가 그것을 다시 연결하면, 즉 중립에 살고 그 반대의 경우도 마찬가지입니다. 앞으로 간다고 말하면 돌아올 것입니다. 엔진 배치도 마찬가지입니다.
다음 다이어그램에서 기본 연결을 볼 수 있습니다. 설치한 라이브러리와 함께 제공되는 샘플 코드를 다운로드해 보겠습니다. 이 두 단계는 스테퍼 모터. 더 많은 정보가 필요하시면 찾아보시면 됩니다.
결과적으로 매우 잘 나타났습니다. 엔진 속도는 동력을 유지하면서 조절됩니다. 그것에 대해 비디오를 만들었습니다 -

