Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым , параллельным (шунтовым), последовательным (сериесным) и смешанным (компаундным) возбуждением.
Двигатели независимого возбуждения , требуют два источника питания (рис.11.9,а). Один из них необходим для питания обмотки якоря (выводы Я1 и Я2 ), а другой - для создания тока в обмотке возбуждения (выводы обмотки Ш1 и Ш2 ). Дополнительное сопротивление Rд в цепи обмотки якоря необходимо для уменьшения пускового тока двигателя в момент его включения.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Двигатели параллельного возбуждения включаются в соответствии со схемой, показанной на рис.11.9,б. Зажимы Я1 и Я2 относятся к обмотке якоря, а зажимы Ш1 иШ2 - к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд и Rв предназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи . В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось.
С увеличением частоты вращения добавочное (дополнительное) сопротивление Rд в цепи якоря следует уменьшать, а при достижении установившейся частоты вращения – вывести полностью.
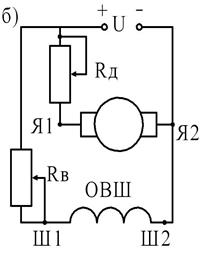
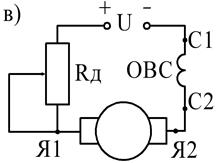
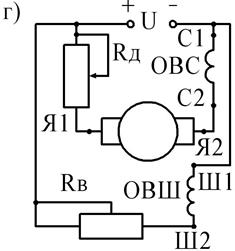
Рис.11.9. Виды возбуждения машин постоянного тока,
а - независимого возбуждения, б - параллельного возбуждения,
в - последовательного возбуждения, г - смешанного возбуждения.
ОВШ - обмотка возбуждения шунтовая, ОВС - обмотка возбуждения сериесная," ОВН - обмотка независимого возбуждения, Rд -дополнительное сопротивление в цепи обмотки якоря, Rв- дополнительное сопротивление в цепи обмотки возбуждения.
Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10...40 раз .
Важным свойством двигателя параллельного возбуждения служит практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% .
Второй особенностью этих двигателей служит экономичное регулирование частоты вращения, при котором отношение наибольшей скорости к наименьшей может составлять 2:1 , а при специальном исполнении двигателя - 6:1 . Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины - при значительном ослаблении магнитного потока двигатель может пойти «вразнос» .
Двигатели последовательного возбуждения (сериесные) включаются по схеме, (рис.11.9, в). Выводы С1 и С2 соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря . Дополнительное сопротивление Rд в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5...2,5)Iн . После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается . В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя . Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту вращения в широких пределах.
Двигатели смешанного возбуждения (компаундные), занимают промежуточное положение между двигателями параллельного и последовательного возбуждения (рис.11.9, г). Большая принадлежность их к тому или другому виду зависит от соотношения частей основного потока возбуждения, создаваемых параллельной или последовательной обмотками возбуждения. В момент включения двигателя для уменьшения пускового тока в цепь обмотки якоря включается дополнительное сопротивление Rд . Этот двигатель обладает хорошими тяговыми характеристиками и может работать в режиме холостого хода.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
Обозначение машин постоянного тока
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий .
Двигатели серий 2П и 4П подразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А . Машины серии2П имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух длин (М и L ).
Электрические машины серии 4П имеют лучшие некоторые технико - экономические показатели по сравнению с серией 2П . трудоемкость изготовления серии 4П по сравнению с 2П снижена в 2,5...3 раза. При этом расход меди снижается на 25...30 %. По ряду конструктивных особенностей, в том числе по способу охлаждения, по защите от атмосферных воздействий, по использованию отдельных деталей и узлов машины серии 4П унифицированы с асинхронными двигателями серии 4А иАИ .
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
ПХ1Х2ХЗХ4 ,
где 2П - серия машины постоянного тока;
XI - исполнение по типу защиты: Н - защищенное с самовентиляцией, Ф - защищенное с независимой вентиляцией, Б - закрытое с естественным охлаждением, О - закрытое с обдувом от постороннего вентилятора;
Х2 - высота оси вращения (двухзначное или трехзначное число) в мм;
ХЗ - условная длина статора: М - первая, L - вторая, Г - с тахогенератором;
В качестве примера можно привести обозначение двигателя 2ПН112МГУ - двигатель постоянного тока серии 2П , защищенного исполнения с самовентиляцией Н ,112 высота оси вращения в мм, первый размер статораМ , укомплектован тахогенератором Г , используется для умеренного климатаУ .
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы :
Микромашины ………………………...меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,
Высокого напряжения……………выше 1000В.
По частоте вращения машины постоянного тока могут быть представлены как:
Тихоходные…………….менее 250 об/мин.,
Средней скорости………от 250 до 1000 об/мин.,
Быстроходные………….от 1000 до 3000 об/мин.
Сверхбыстроходные…..выше 3000 об/мин.
Задание и методика выполнения работы.
1.Изучить устройство и назначение отдельных частей электрических машин постоянного тока.
2.Определить выводы машины постоянного тока, относящиеся к обмотке якоря и к обмотке возбуждения.
Выводы, соответствующие той или иной обмотке, могут быть определены мегомметром, омметром или с помощью электрической лампочки. При использовании мегомметра один его конец присоединяется к одному из выводов обмоток, а другим поочередно касаются к остальным. Измеренное сопротивление, равное нулю, укажет на соответствие двух выводов одной обмотки.
3.Распознать по выводам обмотку якоря и обмотку возбуждения. Определить вид обмотки возбуждения (параллельного возбуждения или последовательного).
Этот опыт можно осуществить с помощью электрической лампочки, подключаемой последовательно с обмотками Постоянное напряжение следует подавать плавно, постепенно повышая его до указанного номинального значения в паспорте машины.
С учетом малого сопротивления якорной обмотки и обмотки последовательного возбуждения лампочка загорится ярко, а их сопротивления, измеренные мегомметром (или омметром) будут практически равны нулю.
Лампочка, соединенная последовательно с параллельной обмоткой возбуждения, будет гореть тускло. Значение сопротивления параллельной обмоткой возбуждения должно находиться в пределах 0,3...0,5 кОм .
Выводы якорной обмотки можно распознать путем присоединения одного конца мегомметра к щеткам, касаясь при этом другим его концом к выводам обмоток на щитке электрической машины.
Выводы обмоток электрической машины следует обозначить на изображенной в отчете условной этикетке выводов.
 Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм
. Данные замеров отобразить в отчете.
Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм
. Данные замеров отобразить в отчете.
Изобразить условно в поперечном разрезе главные полюсы с обмоткой возбуждения и якорь с витками обмотки, находящимися под полюсами (подобно рис.11.10). Самостоятельно принять направление тока в обмотках возбуждения и якоря. Указать при этих условиях направление вращения двигателя.
Рис. 11.10. Двухполюсная машина постоянного тока:
1 - станина; 2 -якорь; 3 - главные полюсы; 4 - обмотка возбуждения; 5 - полюсные наконечники; 6 - обмотка якоря; 7 - коллектор; Ф - основной магнитный поток; F - сила, действующая на проводники обмотки якоря.
Контрольные вопросы и задания для самостоятельной подготовки
1: Объяснить устройство и принцип действия двигателя и генератора постоянного тока.
2. Пояснить назначение коллектора машин постоянного тока.
3.Дать понятие полюсного деления и привести выражение для его определения.
4.Назвать основные виды обмоток, применяемых в машинах постоянного тока, и знать способы их выполнения.
5.Указать основные достоинства двигателей параллельного возбуждения.
6.Каковы конструктивные особенности обмотки параллельного возбуждения по сравнению с обмоткой последовательного возбуждения?
7.В чем особенность пуска двигателей постоянного тока последовательного возбуждения?
8.Сколько параллельных ветвей имеют простая волновая и простая петлевая обмотки машин постоянного тока?
9.Как обозначаются машины постоянного тока? Привести пример обозначения.
10.Какой величины допускается сопротивление изоляции между обмотками машин постоянного тока и между обмотками и корпусом?
11.Какой величины может достигнуть ток в момент пуска двигателя при отсутствии дополнительного сопротивления в цепи обмотки якоря?
12.Какой величины допускается пусковой ток двигателя?
13.В каких случаях допускается пуск двигателя постоянного тока без дополнительного сопротивления в цепи обмотки якоря?
14.За счет чего можно изменить ЭДС генератора независимого возбуждения?
15.Каково назначение дополнительных полюсов машины постоянного тока?
16.При каких нагрузках допускается включение двигателя последовательного возбуждения?
17.Чем определяется величина основного магнитного потока?
18.Написать выражения ЭДС генератора и момента вращения двигателя. Дать понятие входящих в них составляющих.
ЛАБОРАТОРНАЯ РАБОТА 12.
Позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
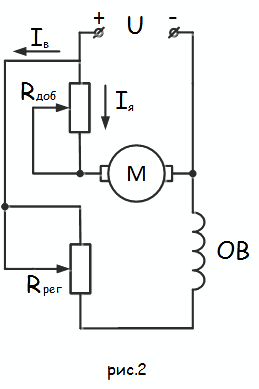
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.

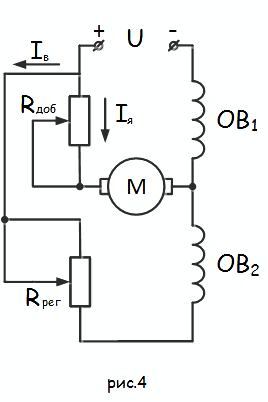
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Из курса электротехники известно, что уравнение механической характеристики можно записать в виде
![]()
где коэффициенты Се и См зависят от конструктивных данных двигателя; U - напряжение сети; Ф - магнитный поток двигателя; R - сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения n н, а n o называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R", куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
Рис. 1. Механические характеристики двигателей постоянного тока: а - при изменении сопротивления в цепи ротора, б - при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в - при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г - при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем
![]()
т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1:4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1:8, диапазон увеличивается при применении тиристорных преобразователей.
К атегория:
Электрооборудование строительных машин
Механические характеристики электродвигателей постоянного тока
1. Электродвигатели с параллельным возбуждением
На рис. 7 приведена схема включения двигателя параллельного возбуждения.
Скорость вращения двигателя может быть выражена через ток в цепи яко,ря или через электромагнитный момент на валу двигателя.
Рис. 7. Схема включения двигателя постоянного тока параллельного возбуждения
Для построения механической характеристики двигателя параллельного возбуждения достаточно иметь две ее точки, так как характеристика имеет вид прямой линии (прямолинейна).
На рис. 8 приведены естественные и искусственные механические характеристики двигателя постоянного тока параллельного возбуждения.
Рис. 8. Механические характеристики двигателя постоянного тока с параллельным возбуждением
1 - естественная; 2 - искусственные при различных потоках возбуждения; 3 - искусственные при различных напряжениях; 4 - искусственные при различных сопротивлениях в цепи якоря
Искусственные механические характеристики, получаемые за счет изменения магнитного потока Ф или подводимого напряжения U (рис. 8, прямые 2 и 3), являются жесткими характеристиками, а получаемые за счет изменения сопротивления якорной цепи R - мягкими характеристиками (рис. 8, прямая 4).
Реверсирование вращения двигателя постоянного тока осуществляется изменением направления тока либо в обмотке якоря, либо в обмотке возбуждения. Переключение обмотки возбуждения практикуется реже, так как вследствие ее индуктивности время торможения возрастает по сравнению с переключением обмотки якоря.
Скоростные и механические характеристики, соответствующие условиям задачи, представлены на рис. 9.
Рис. 9. Естественная и искусственные скоростные (а) и механические (б) характеристики двигателя параллельного -возбуждения (к примеру 2)
В современных электроприводах часто возникает необходимость останавливать производственный механизм или изменять направление его движения. Эти операции можно осуществлять переводом электродвигателя в тормозной режим работы по одной из механических характеристик, отвечающих выбранному способу электрического торможения. Механические характеристики двигателя с параллельным возбуждением для различных режимов работы представлены на рис. 10.
Рис. 10. Механические характеристики двигателя с параллельным возбужденней при различных режимах работы
В этом режиме ток и момент на валу двигателя отрицательны. Рассматриваемый тормйзной режим работы электродвигателя создается автоматически, без каких-либо переключений в нормальной схеме, если ток возбуждения увеличивается или скорость вращения двигателя повышается сверх возможной скорости п0. В этом случае электрическая машина работает как генератор, отдавая электрическую энергию в сеть. Развиваемый машиной тормозной момент уравновешивается движущим моментом, приложенным к валу. Этот способ торможения применяется в крановых и других установках при спуске груза. Генераторное торможение в электроприводах с частыми пусками и остановками является весьма экономичным, поскольку оно сопровождается отдачей электроэнергии в сеть.
Генераторное торможение с отдачей энергии в сеть.
Механические характеристики машины в режиме генераторного торможения с отдачей энергии в сеть являются естественным продолжением характеристик двигательного режима в область квадранта II (см. рис. 10).
Генераторное торможение при замыкании якоря машины на сопротивление (динамическое торможение).
Механические характеристики машины в рассматриваемом режиме проходят через начало координат, располагаясь в квадранте II (см. рис. 10), так как при положительном значении скорости вращения ток и момент отрицательны по знаку. Жесткость характеристик уменьшается с увеличением сопротивления якорной цепи. В режиме динамического торможения машина работает генератором за счет кинетической энергии, накопленной во вращающихся инерционных массах электропривода и производственного механизма.
Схема включения двигателя, позволяющая перевести его в режим динамического торможения, приведена на рис. 11. Для осуществления торможения якорь двигателя необходимо отключить от сети контактором К и замкнуть его на сопротивление Rn контактором КТ. Обмотка возбуждения при этом остается включенной в сет‘ь так же, как и в двигательном режиме. Якорь двигателя, как уже указывалось, будет продолжать вращаться за счет кинетической энергии, запасенной в движущихся частях привода. Возникающая при этом э. д. с. ея вызовет ток в цепи якоря. Направление э. д. с. сохранится то же, что и в двигательном режиме, а ток и момент двигателя изменят свое направление. Двигатель будет развивать тормозной момент, направленный против движения. Под его воздействием произойдет быстрая остановка двигателя и связанных с ним вращающихся частей механизма.
Торможение прогивовключением. Механические характеристики двигателя в рассматриваемом режиме являются продолжением в квадрант IV механических характеристик двигательного режима (см. рис. 10).
Режим противовключения имеет место, когда момент на валу от груза (в подъемных механизмах) оказывается больше предельного момента, который может развивать электродвигатель в двигательном ‘режиме. В этом случае груз под действием своего веса начнет опускаться, что приведет к вращению электродвигателя в сторону’, противоположную той, которая определяется полярностью приложенного напряжения при данном включении обмоток. Направление тока при этом остается неизменным, т. е. таким же, что и в двигательном режиме; момент двигателя также сохраняет свой знак, но по отношению к новому установившемуся движению он будет являться тормозным.
Рис. 11. Схема включения двигателя при динамическом торможении
Величина тока в режиме противовключения больше, чем в двигательном режиме, поэтому и величина момента, развиваемая двигателем при торможении противо-включением, также увеличивается.
Режим противовключения часто используется в электроприводах для быстрого изменения направления их вращения-реверсирования.
Тормозной режим работы двигателя противовключе-нием может быть использован и для быстрой остановки производственного механизма. Для этого надо изменить полярность напряжения на зажимах обмотки якоря. Схема включения двигателя при торможении противовключением представлена на рис. 12. До перехода в режим противовключения якорь двигателя подключен к сети контактором КВ. Для осуществления торможения якорь двигателя отключается от сети этим контактором и снова включается в сеть контактором КН. При этом изменяется полярность напряжения на обмотке якоря и направление тока в нем. Двигатель создает тормозной момент и начинает останавливаться. Ограничение тока якоря в тормозном режиме производится путем включения добавочного сопротивления RB в цепь якоря. Переключение двигателя с помощью контакторов происходит автоматически, и скорость вращения двигателя за время переключения практически не изменяется.
Рис. 12. Схема включения двигателя при торможении противовключением
Следует иметь в виду, что если якорь двигателя не будет отключен от сети при скорости, близкой к нулю, то в соответствии со схемой включения двигателя начнется разбег его в обратном направлении.
При торможении противовключением двигатель Не только преобразует кинетическую энергию, запасенную в движущихся частях, в электрическую, но и потребляет энергию из сети. Энергия затрачивается (теряется) на нагрев сопротивлений в цепи якоря.
Из последнего равенства следует, что между моментом электродвигателя с последовательным возбуждением и его скоростью в области небольших нагрузок (ненасыщенная магнитная цепь) существует гиперболическая зависимость.
Механические характеристики электродвигателя с последовательным возбуждением при различных режимах работы приведены на рис. 14.
2. Электродвигатели с последовательным возбуждением
На рис. 13 приведена схема включения двигателя последовательного возбуждения.
Уравнение скоростной характеристики электродвигателя с последовательным возбуждением то же, что и для электродвигателя с параллельным возбуждением.
Поскольку магнитный поток пропорционален величине тока, можно, подставляя в формулу значение из равенства, получить путем преобразований выражение механической характеристики для двигателя с последовательным возбуждением:
Рис. 13. Схема включения двигателя постоянного тока последовательного возбуждения
Рис. 14. Механические характеристики двигателя с последовательным возбуждением при различных режимах работы
Анализ характера механической характеристики электродвигателя с последовательным возбуждением позволяет сделать следующие выводы:
а) при нагрузках ниже 20-25% номинальной работа электродвигателя на естественной характеристике практически недопустима из-за чрезмерного увеличения скорости вращения якоря (рис. 14, кривая 1);
б) с увеличением дополнительного сопротивления в цепи якоря жесткость механической характеристики уменьшается и она смещается вниз (рис. 14, кривая 2);
в) кривая механической характеристики асимптотически, как это следует из рис. 14, приближается к оси ординат, не пересекаясь с ней, из чего следует, что повышением скорости вращения нельзя перевести электродвигатель с последовательным возбуждением в генераторный режим работы с отдачей энергии в сеть (как это возможно у машины с параллельным возбуждением).
Для торможения машины с последовательным возбуждением обычно применяют противовключение или динамическое торможение.
При торможении противовключением механические характеристики являются продолжением характеристик двигательного режима в область отрицательной скорости. При этом в цепь двигателя вводится дополнительное сопротивление для ограничения тока. Двигатель с последовательным возбуждением работает в режиме противовключения при перемене полярности якоря. В обмотке возбуждения направление тока должно оставаться неизменным.
При динамическом торможении механические характеристики двигателя расположены в квадранте II. Тормозной момент в режиме динамического торможения при самовозбуждении уменьшается со снижением скорости машины.
Более эффективным является динамическое торможение с независимым возбуждением. В этом случае обмотка якоря отключается от сети и замыкается на внешнее сопротивление, а обмотка возбуждения подсоединяется к сети через дополнительное сопротивление. Поскольку в последнем случае двигатель работает генератором с независимым возбуждением, его характеристики подобны характеристикам двигателя с параллельным возбуждением при динамическом торможении. Эти характеристики прямолинейны и все пересекаются в начале координат, обладая большей жесткостью при меньших сопротивлениях.

Рис. 15. Схема включения двигателя в режиме динамического торможения при независимом питании обмотки возбуждения от сети
На рис. 15 приведена схема включения двигателя в режиме динамического торможения при независимом питании обмотки возбуждения от сети,
Двигатели постоянного тока, как обладающие большим пусковым моментом и выдерживающие значительные кратковременные перегрузки, нашли широкое применение в электроприводе крупных экскаваторов. К недостаткам применения двигателей постоянного тока относится необходимость установки преобразователей переменного тока в постоянный для питания этих двигателей.
К атегория: - Электрооборудование строительных машин
Лекция 5.
2.3. Механические характеристики двигателей постоянного тока независимого возбуждения. Двигательный режим
Электрический двигатель, в отличие от двигателей других типов, способен сам автоматически разгоняться до скорости установившегося режима работы, снижать скорость при увеличении момента сопротивления и из установившегося режима с большей скоростью переходить в установившийся режим с меньшей скоростью, увеличивать скорость при уменьшении момента сопротивления и переходить из установившегося режима с меньшей скоростью к установившемуся режиму с большей скоростью. Эта особенность электрического двигателя объясняется тем, что между скоростью вращения и вращающим моментом двигателя существует зависимость ω=f(М) , в соответствии с которой с увеличением момента скорость уменьшается и наоборот. Называют эту зависимость механической характеристикой двигателя.
С помощью механической характеристики можно определить основные свойства электрического двигателя и проверить их соответствие требованиям технологической машины.
Оси абсцисс и ординат, по которым откладываются соответственно величины М и ω , разделяют плоскость на четыре квадрата. Первый номер принято присваивать верхнему правому квадрату, а остальные нумеровать против часовой стрелки.
В первом квадранте знаки М и ω , а значит и направление величин, совпадает. Поэтому в нём располагаются механические характеристики для двигательного режима работы электрической машины. Аналогичные характеристики для противоположного направления вращения располагаются и в третьем квадранте, так как знаки М и ω отрицательны.
Во втором квадранте скорость ω положительна, а момент М имеет отрицательный знак. Поэтому в нём располагаются механические характеристики, соответствующие режиму электрического торможения, когда под действием инерционных сил направление вращения сохраняется, а направление момента за счёт изменения схемы включения двигателя изменяется на противоположное. Аналогичные характеристики для противоположного направления вращения располагаются и в четвёртом квадранте, так как в нём ω имеет отрицательный знак, а М – положительный.
Схема включения двигателя постоянного тока (ДПТ) с независимым возбуждением приведена на рис. 2.1.
Якорь двигателя и обмотка возбуждения LM получает питание от независимых источников напряжения U и U в . Поэтому ток в обмотке возбуждения І в не зависит от тока якоря І я . Мощность источника U в не превышает 15% от мощности источника U .
При вращающемся якоре в его обмотке наводится э.д.с. вращения Е . На схеме включения двигателя направление Е встречно по отношению к направлению U , что соответствует двигательному режиму работы. Величина Е равна:
где ω – угловая скорость двигателя;
Рис. 2.1 – Схема включения двигателя постоянного тока с независимым возбуждением
Ф –поток двигателя;
 – конструктивный коэффициент двигателя, данные, для расчёта которого приводятся в справочниках.
– конструктивный коэффициент двигателя, данные, для расчёта которого приводятся в справочниках.
Здесь р – число пар полюсов двигателя; N – число активных проводников обмотки якоря; а – число пар параллельных ветвей обмотки якоря.
Направление якорного тока I я , как и направление Е, на схеме включения показано для двигательного режима работы.
Допустимое значение якорного тока двигателя I я.доп. ограничивается условиями коммутации и механической прочностью якоря и не должно превышать номинальный ток I я.н. более чем в 2,5 раза - I я.доп. ≤ 2,5∙ I я.н. .
В соответствии с уравнением равновесия напряжений при установившемся режиме работы двигателя напряжение U , приложенное к якорной цепи двигателя, уравновешивается падением напряжения в якорной цепи I Я R ЯЦ и наведённой в обмотке якоря э.д.с. вращения Е :
 ,
,
где – суммарное сопротивление якорной цепи.
Здесь R Я – сопротивление обмотки якоря; R ДП – сопротивление обмотки дополнительных полюсов; R КО – сопротивление компенсационной обмотки; R П – сопротивление пускового реостата.
Величина I Я в установившемся режиме будет равна:
 .
.
В режиме пуска Е=0 , поэтому из–за небольшого сопротивления обмоток пусковой ток I яп может превышать допустимое значение. Для ограничения пускового тока служит пусковой реостат, сопротивление которого R п выбирается таким образом, чтобы I ЯП ≤ I я.доп. .
 .
.
В цепи питания LM включён реостат с сопротивлением R В . С его помощью уменьшается ток в обмотке возбуждения. В результате поток двигателя Ф ослабляется, становясь меньше номинального значения Ф≤Ф н .
Из уравнения равновесия напряжений для якорной цепи можно получить аналитическое выражение для механической характеристики двигателя.
Подставив в него вместо э.д.с. вращения Е, её значение и решив полученное уравнение относительно скорости, получим зависимость скорости двигателя ω от тока якоря I Я ω=f(I Я ) , которая называется электромеханической характеристикой:
 .
.
Вращающий момент двигателя М связан с током якоря и магнитным потоком зависимостью М=кФI Я . Подставив в уравнение электромеханической характеристики значения для тока I Я =М/кФ , получим выражение для механической характеристики ω=f(М) :
 или
или  ,
,
где с=кФ – коэффициент, принимаемый постоянным и не зависящим от тока якоря, если у двигателя имеется компенсационная обмотка или если реакцию якоря не учитывать.
При неизменных параметрах U, Ф, R ЯЦ уравнение механической характеристики есть уравнение прямой линии.
В режиме идеального холостого хода М с =0 и М=0 , поскольку в установившемся режиме двигатель работает с М=М с . Тогда
 ,
,
где ω 0 –скорость идеального холостого хода.
При увеличении момента сопротивления скорость установившегося режима уменьшается на величину статического падения скорости Δω с , которое равно:
 .
.
Таким образом, уравнение для механической характеристики двигателя можно записать в следующем виде:
 .
.
Механическая характеристика двигателя, которая получается при отсутствии внешних сопротивлений в якорной цепи (R П =0) и номинальных значениях потока двигателя (Ф=Ф н ) и напряжения на якоре (U=U н ) называется естественной характеристикой. Следует отметить, что выполнение двух первых условий не вызывает трудностей. Третье условие (U=U н ) выполняется в том случае, если якорная цепь двигателя питается от источника бесконечной мощности или в замкнутой системе преобразователь-двигатель с обратной связью по напряжению преобразователя и астатическим регулятором напряжения.
Построить естественную характеристику, учитывая её линейность, можно по двум точкам – точке идеального холостого хода с координатами (М=0; ω=ω 0 ) и точке, соответствующей номинальному режиму работы (М=М н ; ω=ω н ) . На основании паспортных данных двигателя (Р н , U н , І н , n н ) можно найти:
 .
.
Естественная характеристика приведена на рис. 2.2.
Рис. 2.2 - Механические характеристики двигателя постоянного тока независимого возбуждения.
При скорости двигателя ток ω=ω 0 І Я =0 , так как э.д.с. вращения Е=U и направлена по отношению к нему встречно. Работать в двигательном режиме со скоростью ω=ω 0 двигатель не может, так как даже при отсутствии нагрузки со стороны технологической машины трение в подшипниках и крыльчатка вентилятора создают момент сопротивления холостого хода М схх . Двигатель в установившемся режиме будет работать с М= М схх и ω=ω хх <ω 0 . При этом Е, а І я >0 .
Найти величину ω хх можно, изобразив в одном квадрате с механической характеристикой двигателя механическую характеристику технологической машины. Если предположить, что М с не зависит от скорости, то через точку с координатами (ω=0; М=М схх ) необходимо провести вертикальную прямую до её пересечения с механической характеристикой двигателя (точка А) . В точке А М=М с , а её проекция на ось ординат равна ω хх .
При увеличении момента сопротивления от М схх до М с =М н появится отрицательный динамический момент М Д <0 и скорость двигателя начнёт уменьшаться. Следствием этого будет уменьшение э.д.с. вращения Е=кωФ , увеличение якорного тока І Я =(U–Е)/R ЯЦ и вращающего момента М=кI Я Ф . Снижение скорости и увеличение момента двигателя будет продолжаться до тех пор, пока М Д не станет равным нулю, т.е. момент двигателя М Д не станет равным М с =М н . .
Благодаря тому, что в обмотке якоря наводится э.д.с. вращения Е , двигатель при увеличении М с автоматически, снизив скорость вращения и увеличив вращающий момент, перешёл из установившегося режима с большей скоростью (ω х.х . в точке А ) в установившийся режим с меньшей скоростью (ω н в точке В ).
Статически падение скорости на естественной характеристике равно:
 .
.
Если сопротивление пускового реостата R П >0 , то Δω с при одном и том же моменте двигателя будет больше, чем на естественной характеристике:
 .
.
Поскольку величина ω 0 не зависит от величины R П , то получаемая в этом случае характеристика, которая называется искусственной или реостатной, будет начинаться в той же точке, что и естественная, но проходить с большим наклоном к оси абсцисс.
Якорный ток I я и момент двигателя М связаны прямой пропорциональной зависимостью. Поэтому ограничение с помощью R п пускового тока значением I я.доп. ≤2,5 I ян автоматически ограничивает и допустимое значение пускового момента М доп ≤2,5М н . Механическая характеристика на рис. 2.2 в этом случае пересекает ось абсцисс в точке с координатами (ω=0; М=М доп =2,5М н ) и называется предельной пусковой. Реостатные характеристики, расположенные выше получаются при меньших величинах R П . Запускаясь при М с =М н по предельной пусковой характеристике, двигатель разгонится до скорости ω 1 и перейдёт в установившийся режим работы. Для увеличения скорости двигателя необходимо уменьшить величину R П .
Лекция 6.
2.4. Механические характеристики двигателя постоянного тока с независимым возбуждением. Режим электрического торможения
Для повышения производительности технологической машины или улучшения качества продукции часто необходимо быстро и точно остановить электропривод. В начале процесса торможения, во-первых, заканчивается преобразование ЭЭ в МЭ и подача её к рабочему органу технологической машины и, во–вторых, начинается отбор МЭ , запасённой в механической части привода. В зависимости от того, куда расходуется эта энергия, можно выделить три способа торможения.
Торможение в режиме свободного выбега – запасённая МЭ расходуется на преодоление сил сопротивления. Движение рабочего органа может продолжаться ещё достаточно долго.
Механическое торможение – запасённая МЭ в механическом тормозном устройстве преобразуется в тепловую. Время торможения может быть очень небольшим, но при этом плавность торможения регулируется плохо, что приводит к появлению значительных динамических нагрузок.
Электрическое торможение – запасённая МЭ , благодаря свойству обратимости электрической машины, преобразовывается двигателем в ЭЭ и либо отдается в сеть, либо затрачивается на нагрев двигателя. Управляя процессом преобразования ЭЭ в МЭ можно обеспечивать плавное торможение и ограничивать величину динамических нагрузок.
Существует три способа электрического торможения: торможение с отдачей энергии в сеть (рекуперативное торможение), динамическое торможение и торможение противовключением.
Рекуперативное торможение возможно в том случае, когда скорость двигателя оказывается выше скорости идеального холостого хода ω>ω 0 и э.д.с. вращения становится больше напряжения якорного источника Е>U .
В приводе подъёмной лебёдки рекуперативное торможение используется при опускании поднятого груза, который создаёт активный М с . Двигатель включается в направлении опускания груза и в этом же направлении его раскручивает момент сопротивления. Поэтому уравнение движения электропривода будет иметь вид:

Поскольку М Д >0 , скорость вращения двигателя будет увеличиваться. С увеличением ω , будет увеличиваться э.д.с. Е=кωФ и, как следствие, будут уменьшаться якорный ток I Я =(U–Е)/R ЯЦ и момент М=кI Я Ф .
При ω=ω 0 Е будет равно U , а т.к. они направлены встречно, то I Я =0 и М=0 . Уравнение движения в этом случае примет вид:
Момент динамический остаётся положительным М Д >0 и под действие активного М с скорость вращения двигателя будет увеличиваться.
При ω>ω 0 Е станет больше U и ток I Я изменит своё направление.
Следовательно, изменяет направление и становится тормозным момент двигателя М= –кФI Я . Уравнение движения приобретает вид:
Когда абсолютное значение |M| достигнет величины М с, момент динамический станет равным нулю М Д =0 и увеличение скорости вращения двигателя и опускания груза прекратится.
Если характеристики двигателя при подъёме груза располагаются в первом квадрате, то при опускании для двигательного режима они будут располагаться в третьем квадрате, а для режима электрического торможения – в четвёртом.
Уравнение механической характеристики в режиме рекуперативного торможения будет иметь вид:
Характеристика проходит через точку –ω 0 = –U/кФ . Наклон её определяется сомножителем второго слагаемого R ЯЦ /к 2 Ф 2 , который по абсолютному значению при заданном сопротивлении R ЯЦ остаётся неизменным. Следовательно, наклон механической характеристики будет таким же, как и в двигательном режиме, и она является продолжением характеристик для двигательного режима из ІІІ квадрата в IV. Характеристики приведены на рис. 2.3.
При работе двигателя на естественной характеристике увеличение скорости опускания груза прекратится при скорости (–ω 1 ) , а на реостатной – (–ω 2 ) .
В режиме рекуперативного торможения двигатель работает как генератор, включённый параллельно с сетью. Он преобразовывает МЭ в ЭЭ и отдает её в сеть.
Рис. 2.3 - Характеристики двигателя постоянного тока с независимым возбуждением в режиме рекуперативного торможения.
Динамическое торможение. Для перевода работающего двигателя в режим динамического торможения якорная цепь отключается от источника якорного напряжения и на зажимы якоря подключается реостат динамического торможения R ДТ . Схема включения двигателя приведена на рис.2.4а.
Под действием инерционных сил якорь продолжает вращаться в прежнем направлении, а полярность напряжения U в , прикладываемого к обмотке возбуждения, не изменяется. Следовательно, сохраняет своё направление э.д.с. вращения Е . В образовавшемся контуре ток I я будет протекать под действием Е . Поскольку Е направлено встречно U , то и направление тока по отношению к двигательному режиму изменится на противоположное:
 .
.

Рис. 2.4 – а) схема включения двигателя в режиме динамического
торможения;
б) характеристики двигателя в режиме динамического
торможения.
Момент двигателя становится тормозным М= –кФI Я . Поскольку U=0 , уравнение механической характеристики двигателя в режиме динамического торможения имеет вид:
 .
.
Механические характеристики двигателя в режиме динамического торможения приведены на рис. 2.4б. Они представляют расположенные во втором квадранте прямые линии, проходящие через начало координат.
Двигатель, работавший в точке А на естественной характеристике, в зависимости от величины R ДТ перейдет в точку В или С на характеристике динамического торможения. С уменьшением скорости двигателя ω будут уменьшаться Е , I ЯДТ и тормозной момент двигателя М. При ω=0 будут равны нулю Е , I ЯДТ , М , поэтому характеристика динамического торможения и проходит через начало координат.
Двигатель в режиме динамического торможения работает как автономный генератор. Он преобразовывает МЭ в ЭЭ, которая выделяется в виде тепла на сопротивлениях, включенных в цепь протекания I ЯДТ .
Динамическое торможение используется для остановки электропривода при реактивном М с , при опускании груза в подъемных механизмах.
Торможение противовключением. Осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а вращающаяся часть двигателя под воздействием сил инерции или активного момента сопротивления М с вращается в противоположную сторону – против включения.
Наиболее часто торможение противовключением используется в реверсивных электроприводах, так как реверсу двигатель обязательно предшествует процесс торможения. Реверсивная схема включения ДПТ с независимым возбуждением приведена на рис. 2.5. Реверс осуществляется со стороны якоря двигателя, для чего якорь включен в реверсивный мост, образованный главными контактами контакторов направления вращения КВ («вперед» в электроприводах передвижения или «верх» в электроприводах подъёма) и КН («назад» и «низ» соответственно). При реверсе со стороны обмотки возбуждения она включается в реверсивный мост, образованный контактами электрических аппаратов меньшего габарита, так как потребляемая по цепи питания обмотки возбуждения мощность не превышает 15% мощности, потребляемой по цепи питания якоря. Однако реверс со стороны якоря осуществляется гораздо быстрее, поскольку постоянная времени якорной цепи Т я на порядок меньше постоянной времени цепи возбуждения Т в .
Рис 2.5 - Реверсивная схема включения ДПТ с независимым
возбуждением
В цепь протекания тока I я включены пусковой реостат с сопротивлением R П и реостат противовключения R ПР . Такая схема включения двигателя может быть в электроприводе подъемной лебедки, на крюке которой подвешен груз массой m .
Допустим, что замкнуты контакты КВ, а R П и R ПР зашунтированы, то есть их сопротивления равны нулю. Зажим якоря Я1 подключен к +U, а Д2 к – U источника якорного напряжения. Ток в якоре I Я протекает от Я1 к Д2, а э.д.с. вращения Е направлено в обратную сторону, то есть от Д2 к Я1.
Размыкаются контакты КВ и замыкаются КН. Якорь двигателя подключается к источнику якорного напряжения с обратной полярностью. Это означает, что двигатель включается для работы в противоположном направлении. В момент переключения якорь двигателя под действием инерционных сил сохраняет направление вращения, то есть вращается против включения. Остается неизменным и направление тока в обмотке возбуждения LM. Поэтому сохраняется и направление э.д.с. вращения  .
.
С изменением полярности напряжения на зажимах якоря изменяет направление ток якоря и поэтому момент двигателя становится тормозным. Так как величина Е
в установившемся режиме работы двигателя составляет около 90% от величины U
, то в момент переключения напряжения на зажимах якоря  и ток в начале режима торможения противовключением I
Я ПР
будет существенно превышать пусковой ток I
ЯП
. Поэтому для его ограничения, а также ограничения момента двигателя, одновременно с замыкателем КН в цепь якоря кроме пускового реостата R п необходимо включать и реостат противовключения R
п
р. Сопротивление реостата R
ПР
должно быть таким, чтобы I
Я ПР
≤2,5 I
ЯН
. Тогда ток I
Я ПР
будет определяться по формуле:
и ток в начале режима торможения противовключением I
Я ПР
будет существенно превышать пусковой ток I
ЯП
. Поэтому для его ограничения, а также ограничения момента двигателя, одновременно с замыкателем КН в цепь якоря кроме пускового реостата R п необходимо включать и реостат противовключения R
п
р. Сопротивление реостата R
ПР
должно быть таким, чтобы I
Я ПР
≤2,5 I
ЯН
. Тогда ток I
Я ПР
будет определяться по формуле:
Характеристики ДПТ с независимым возбуждением, соответствующие схеме включения двигателя на рис. 2.5, приведены на рис. 2.6. Поскольку схема включения двигателя реверсивная, характеристики расположены в четырех квадрантах. При замкнутых контактах КВ и зашунтированных R П и R ПР двигатель работает на естественной характеристике в первом квадранте в точке А.
В момент переключения изменяется полярность напряжения на зажимах якоря двигателя и он оказывается включенным для работы в направлении «назад». Поэтому его характеристики будут начинаться в третьем квадранте в точке с координатами (0; -ω 0).
Изменяется направление тока якоря I я и вращающего момента двигателя М . Однако скорость двигателя ω остается неизменной, так как постоянная
времени электромагнитного переходного процесса гораздо меньше постоянной времени электромеханического переходного процесса. Поэтому двигатель из точки А переходит в точку В на характеристике противовключения во втором квадранте по прямой, параллельной оси абсцисс. Если величина R ПР выбрана правильно, то бросок тока якоря и тормозного момента при переключении не превысят допустимого значения.
Рис. 2.6 - Характеристики ДПТ с независимым возбуждением в режиме торможения противовключением
Под влиянием тормозного момента скорость двигателя уменьшается и если он тормозится для остановки, то в точке С необходимо разомкнуть КН и отключить двигатель от напряжения источника. Если же сразу после остановки начинается разгон в противоположном направлении, то при скорости близкой к нулю необходимо зашунтировать R ПР и перевести двигатель на предельную пусковую характеристику. Это обеспечит разгон в направлении «назад» с максимальным ускорением и позволит уменьшить время разгона. В третьем квадранте двигатель будет работать в точке Д на пусковой характеристике или в точке Е на естественной.
Если еще раз изменить полярность напряжения на зажимах якоря двигателя и ввести в якорную цепь R П и R ПР , двигатель перейдет из точки Е в точку F на характеристике противовключения в четвертом квадранте. Процесс торможения и разгон в направлении «вперед» будут протекать аналогично.
В электроприводах с активным М с , например, в электроприводе подъемной лебедки, где активный М с создает груз массой m , подвешенный на крюке, режим торможения противовключением можно получить за счет изменения механической характеристики двигателя. Схема включения двигателя приведена на рис. 2.5, а соответствующие схеме включения механические характеристики двигателя приведены на рис. 2.7. Они располагаются в первом и четвертом квадранте, так как активный М с не изменяет своего направления при изменении направления вращения двигателя.
Рис. 2.7 - Характеристики ДПТ с независимым возбуждением в режиме торможения противовключением при активном М с
Допустим, что замкнуты контакты КВ и зашунтированы R П и R П Р. Двигатель со скоростью ω 1 работает в направлении подъема на естественной характеристике в точке А.
При введении в цепь тока якоря пускового реостата R П двигатель перейдет на предельную пусковую характеристику и будет работать в точке В со скоростью ω 2 . С введением R ПР наклон характеристики будет увеличиваться, а скорость двигателя уменьшаться (ω= ω 3 при R ПР = R ПР1 ).
Можно так подобрать величину R ПР , что М будет равен М с при скорости двигателя ω , равной нулю. На рис. 2.7. этому случаю соответствует точка Д при R ПР = R ПР2 . Двигатель останавливается, и поднимаемый груз удерживается в подвешенном состоянии за счет вращающего момента двигателя М . При
R
ПР
= R
ПР3
момент двигателя М
станет меньше М
с
. Поднятый груз начнет опускаться и двигатель, включенный для работы на подъем, под действием активного М
с
будет вращаться в направлении опускания – против включения. Момент двигателя становится тормозным. Поскольку якорь двигателя теперь вращается в обратную сторону, а направление магнитного потока не изменилось, изменит свое направление э.д.с. вращения двигателя  . Величина якорного тока I
Я ПР
будет определяться выражением:
. Величина якорного тока I
Я ПР
будет определяться выражением:

С увеличением скорости опускания груза, будут увеличиваться Е, I Я ПР и тормозной момент двигателя М . При ω= -ω 4 (точка Е на рис. 2.7.) величина тормозного момента двигателя М станет равной величине активного М с и увеличение скорости опускания груза прекратится.
Такой режим торможения широко используется в электроприводах подъемных лебедок, так как он позволяет получить очень низкие «посадочные» скорости двигателя и устанавливать груз в требуемом месте без удара.
При торможении противовключением э.д.с. вращения Е направлена последовательно – согласовано с напряжением якорного источника U , то есть двигатель работает в режиме генератора, включенного последовательно с сетью. Он преобразует МЭ в ЭЭ, а также потребляет ЭЭ из сети. Вся ЭЭ выделяется в виде тепла в двигателе и на сопротивлениях, включенных в цепи протекания тока якоря. Поэтому торможение противовключением не экономично с точки зрения затрат энергии, однако по сравнению с другими видами оно обеспечивает минимальное время торможения.