24.02.2016
![]()
Хит продаж
Позволяет управлять двигателями без потери мощности.Обязательным условием при этом является наличие таходатчика (тахогенератор) на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует. Если вы начинаете нагружать двигатель, частота вращения вала естественно начнет падать, что так же будет фиксировать таходатчик. Теперь рассмотрим дальше. Сигнал с этого таходатчика поступает на микросхему, она видит это и дает команду силовым элементам, добавить напряжение на электромотор.Таким образом, когда вы надавили на вал (даете нагрузку), плата автоматически прибавила напряжение и мощность на этом валу возросла. И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется "Плата регулировки оборотов коллекторных двигателей без потери мощности".
Снижение пропорционального усиления приведет к более медленному отклику и уменьшит перемодуляцию и переходные колебания, вызванные чрезмерным пропорциональным усилением. Если пропорциональное усиление и интегральное усиление регулируются с близкими друг к другу значениями, может также возникнуть условие сверхмодуляции. Когда установлено значение 0, интегральная компенсация устраняется, что приводит к пропорциональной скорости. Этот выбор идеально подходит для тех систем, где следует избегать чрезмерной модуляции и не требующих существенной «жесткости».
Но мы увидели одну особенность, что эта плата применима только для коллекторных электродвигателей (с электрическими щетками). Конечно такие моторы в быту встречаются намного реже чем асинхронные. Но они нашли широкое применение в стиральных машинах автомат. Вот именно по этому была изготовлена эта схема. Специально для электродвигателя от стиральной машины автомат. Их мощность достаточно приличная, от 200 до 800 ватт. Что позволяет достаточно широко применить их в быту.
Эта функция позволяет очень точно контролировать ее скорость, точность которой также зависит от типа используемого преобразователя. Они не изолируют контрольную и силовую ступень. Предоставьте ссылку на крутящий момент на регулятор крутящего момента. Разрешить настройку параметра скорости.
Он имеет перемычки выбора для включения каждого выхода модуля. Это приведет к короткому замыканию и может повредить модуль. Программа в основном активирует двигатель в одном направлении в течение 4 секунд, затем останавливает двигатель на 5 секунд, затем активирует двигатель в обратном направлении в течение 4 секунд и, наконец, останавливает двигатель на 5 секунд. Затем повторите действие бесконечно.
Увеличение значения интегрального усиления увеличивает низкочастотное усиление и жесткость устройства; чрезмерное интегральное усиление приведет к сверхмодуляции при регулировании скорости перепада и может привести к колебаниям. Типичная настройка - от 1 до 4 Гц. Чтобы вручную настроить управление скоростью, действуйте следующим образом, наблюдая с помощью осциллографа сигнал измеряемой величины: интегральное усиление должно быть сведено к минимуму. Дифференциальный выигрыш до минимума. Отрегулируйте параметр до тех пор, пока не будет получен соответствующий ответ ступенчатым элементам контрольного значения.
Данный продукт, уже нашел широкое применение в хозяйстве людей и широко охватил лиц занимающихся различным хобби и профессиональной деятельностью.
Отвечая на вопрос - Куда можно применить двигатель от стиральной машины? Был сформирован некоторый список. Самодельный токарный станок по дереву; Гриндер; Электропривод для бетономешалки; Точило; Электропривод для медогонки; Соломорезка; Самодельный гончарный круг; Электрическая газонокосилка; Дровокол и много другое где необходимо механическое вращение каких либо механизмов или предметов. И во всех этих случаях нам помогает эта плата "Регулировки оборотов электродвигателей с поддержанием мощности на TDA1085".
Управление биполярным шаговым двигателем
Шаговые двигатели могут быть биполярными или однополярными. В этом примере мы работаем с биполярным шаговым двигателем, однако этот драйвер способен управлять однополюсным шаговым двигателем, если он подключен в биполярной конфигурации, минуя кабели на центральном выступе катушек двигателя. Максимальная допустимая мощность составляет 2 ампера.
Каждая из катушек двигателя подключается к выходу модуля. Для идентификации катушек шагового двигателя мы используем мультиметр в режиме непрерывности. Кабели, обеспечивающие непрерывность, являются концами каждой катушки. Это значение приведено в технических характеристиках листа данных двигателя. Отзывы Луис-дель-Валье Эрнандес.
Увеличьте увеличение жесткости устройства. Удобно следить за шагом отклика обратной связи с помощью осциллографа. На следующих рисунках показано, как реакция обратной связи будет отображаться на осциллографе при различных настройках усиления. На рисунке 2-28 показан отклик контура пропорциональной скорости, когда интегральное усиление определяется как 0 Гц. Однако значение пропорционального усиления слишком низкое.
На рис. 2-29 приведен пример избыточного пропорционального усиления: обратите внимание на переходные колебания в реакции обратной связи процесса. На рисунке 2-30 показан оптимальный отклик для этой конкретной системы. На рисунке 2-31 интегральный коэффициент усиления был установлен слишком высоким для значения пропорционального усиления. В результате возникают переходные колебания и чрезмерная надмодуляция. Поэтому пропорциональный коэффициент усиления процесса должен быть увеличен или интегральное усиление процесса должно быть уменьшено.
Краш-тест платы регулировки оборотов
Позволяет управлять двигателями без потери мощности.Обязательным условием при этом является наличие таходатчика (тахогенератор) на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует. Если вы начинаете нагружать двигатель, частота вращения вала естественно начнет падать, что так же будет фиксировать таходатчик. Теперь рассмотрим дальше. Сигнал с этого таходатчика поступает на микросхему, она видит это и дает команду силовым элементам, добавить напряжение на электромотор.Таким образом, когда вы надавили на вал (даете нагрузку), плата автоматически прибавила напряжение и мощность на этом валу возросла. И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется "Плата регулировки оборотов коллекторных двигателей без потери мощности".
Что касается ступени мощности, можно разделить на две части: эталон мощности, реализованный с транзисторами, используется в приложениях с низкой энергией и нуждается в очень быстрых динамических откликах, таких как случай управления положением; а затем этап мощности, реализованный с тиристорами, используется в высокоэнергетических приложениях для промышленности в целом. Существуют две основные части этапов управления: контроллер скорости и регулятор крутящего момента. Правильная настройка или настройка каждого из этих регуляторов будет зависеть от оптимального отклика системы управления на изменения нагрузки, которые будут пытаться дестабилизировать ее.
Но мы увидели одну особенность, что эта плата применима только для коллекторных электродвигателей (с электрическими щетками). Конечно такие моторы в быту встречаются намного реже чем асинхронные. Но они нашли широкое применение в стиральных машинах автомат. Вот именно по этому была изготовлена эта схема. Специально для электродвигателя от стиральной машины автомат. Их мощность достаточно приличная, от 200 до 800 ватт. Что позволяет достаточно широко применить их в быту.
Эта функция позволяет очень точно контролировать ее скорость, точность которой также зависит от типа используемого преобразователя. Они не изолируют контрольную и силовую ступень. Предоставьте ссылку на крутящий момент на регулятор крутящего момента. Разрешить настройку параметра скорости.
Он имеет перемычки выбора для включения каждого выхода модуля. Это приведет к короткому замыканию и может повредить модуль. Программа в основном активирует двигатель в одном направлении в течение 4 секунд, затем останавливает двигатель на 5 секунд, затем активирует двигатель в обратном направлении в течение 4 секунд и, наконец, останавливает двигатель на 5 секунд. Затем повторите действие бесконечно.
Увеличение значения интегрального усиления увеличивает низкочастотное усиление и жесткость устройства; чрезмерное интегральное усиление приведет к сверхмодуляции при регулировании скорости перепада и может привести к колебаниям. Типичная настройка - от 1 до 4 Гц. Чтобы вручную настроить управление скоростью, действуйте следующим образом, наблюдая с помощью осциллографа сигнал измеряемой величины: интегральное усиление должно быть сведено к минимуму. Дифференциальный выигрыш до минимума. Отрегулируйте параметр до тех пор, пока не будет получен соответствующий ответ ступенчатым элементам контрольного значения.
Данный продукт, уже нашел широкое применение в хозяйстве людей и широко охватил лиц занимающихся различным хобби и профессиональной деятельностью.
Отвечая на вопрос - Куда можно применить двигатель от стиральной машины? Был сформирован некоторый список. Самодельный токарный станок по дереву; Гриндер; Электропривод для бетономешалки; Точило; Электропривод для медогонки; Соломорезка; Самодельный гончарный круг; Электрическая газонокосилка; Дровокол и много другое где необходимо механическое вращение каких либо механизмов или предметов. И во всех этих случаях нам помогает эта плата "Регулировки оборотов электродвигателей с поддержанием мощности на TDA1085".
Управление биполярным шаговым двигателем
Шаговые двигатели могут быть биполярными или однополярными. В этом примере мы работаем с биполярным шаговым двигателем, однако этот драйвер способен управлять однополюсным шаговым двигателем, если он подключен в биполярной конфигурации, минуя кабели на центральном выступе катушек двигателя. Максимальная допустимая мощность составляет 2 ампера.
Каждая из катушек двигателя подключается к выходу модуля. Для идентификации катушек шагового двигателя мы используем мультиметр в режиме непрерывности. Кабели, обеспечивающие непрерывность, являются концами каждой катушки. Это значение приведено в технических характеристиках листа данных двигателя. Отзывы Луис-дель-Валье Эрнандес.
Увеличьте увеличение жесткости устройства. Удобно следить за шагом отклика обратной связи с помощью осциллографа. На следующих рисунках показано, как реакция обратной связи будет отображаться на осциллографе при различных настройках усиления. На рисунке 2-28 показан отклик контура пропорциональной скорости, когда интегральное усиление определяется как 0 Гц. Однако значение пропорционального усиления слишком низкое.
На рис. 2-29 приведен пример избыточного пропорционального усиления: обратите внимание на переходные колебания в реакции обратной связи процесса. На рисунке 2-30 показан оптимальный отклик для этой конкретной системы. На рисунке 2-31 интегральный коэффициент усиления был установлен слишком высоким для значения пропорционального усиления. В результате возникают переходные колебания и чрезмерная надмодуляция. Поэтому пропорциональный коэффициент усиления процесса должен быть увеличен или интегральное усиление процесса должно быть уменьшено.
Краш-тест платы регулировки оборотов
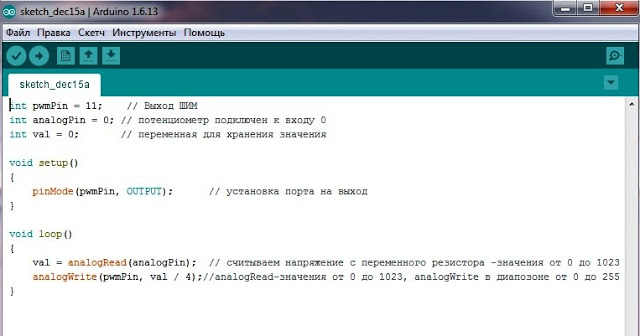
Для наших целей понадобится один аналоговый вход - А0, который используем для подключения переменного резистора, а также один выход ШИМ - возьмём 11. Соберём простую схему:
Самый эффективный и оптимальный способ сделать это - через драйвер. Прежде чем мы начнем видеть что-либо, мы увидим небольшое резюме того, что может принести нам этот щит. Когда вы получите пакет и откройте его, первое, что вы найдете, это. В пластинах такого типа мы можем использовать разъемы типа «мужчина» или «женщина». В чем разница? потому что, прежде всего, что женщина позволит нам использовать остальные штыри пластины, к которой мы подключаем щит.
С другой стороны, штыревые разъемы не допускают этого. Соединители будут выглядеть так. 
Давайте посмотрим на 3 возможных случая. Моторный щит может управлять однополярными и биполярными шаговыми двигателями. Проводка двигателя будет следующей. Помните, что вы должны иметь щит, прикрепленный к доске, чтобы вы могли попробовать.

И напишем простую программу для управления яркостью светодиода, подключённого к 11 выходу ШИМ. Регулировать будем переменным резистором, который подключен к аналоговому входу А0.
Открывает среду разработки. Давайте проанализируем код, который входит в этот пример. В этих трех строках добавляются библиотеки, которые мы будем использовать. Если мы оставим его так, как в примере, он будет использовать адрес по умолчанию. Если мы хотим изменить адрес по умолчанию, мы можем сделать это вручную. Если у нас есть другие устройства, которые используют этот тип связи, мы должны быть осторожны при правильном управлении адресами, чтобы он не повторялся на двух устройствах. Количество шагов на оборот указывается для каждого двигателя и где он подключен.

Получаем первый результат - яркость светодиода изменяется с помощью переменного резистора. Для управления какой-нибудь силовой нагрузкой включённой в сеть 220 вольт такой ШИМ тоже сгодится, только желательно сделать гальваническую развязку между силовой частью и Arduino. Можно взять готовый кусочек схемы из предыдущей страницы
Каждый шаг указывает количество градусов, например, 8 градусов за шаг. Мы также должны указать, где мы подключили двигатель. Это второй параметр, который может принимать значения 1, и вы найдете разницу по отношению к примеру библиотеки. Если мы передадим целое число, мы сообщим вам изменить частоту.
Частота будет зависеть от каждого двигателя. Очень высокие частоты снижают эффективность, а очень низкие частоты делают движение непрерывным. Мой совет - использовать тот, который приходит по умолчанию, и изменять его вверх или вниз в соответствии с характеристиками двигателя.

Провёл небольшие испытания этого ШИМ-регулятора - сначала как обычно подключил активную нагрузку (лампочку накаливания) а затем и коллекторный двигатель. Всё работает. Снял видео -
#define PWM_PIN 11 // выход ШИМ
#define SET_PIN 0 // установка оборотов 0-5 вольт мин-макс
#define TACHO_PIN 1 // сигнал от таходатчика 0-5 вольт мин-макс
Поддерживает целочисленный параметр, который указывает обороты в минуту. Чтобы переместить движок, нам нужно вызвать метод шага. Это параметры, которые необходимо передать методу. Это не тот, который обычно используется, но обычно используется для экономии энергии. Также известен как полушаг, мы увеличиваем на два разрешения, но уменьшаем скорость вдвое. Он идеально подходит для уменьшения механических шумов и предотвращения резонансов. Он не увеличивает разрешение, но поддерживает крутящий момент двигателя.
- Шаги: указывает количество шагов, которые вы хотите переместить двигатель.
- Этот тип обычно называют движением волны или меньшей парой.
Void setup() {
myPID.SetMode(AUTOMATIC);
}
void loop() {
pwmOut = constrain (pwmOut , 0, 250); // это необязательно - по умолчанию 0-255
pwmSet = analogRead(SET_PIN); // считываем показания потенциометра регулировки скорости
pwmSpeed = analogRead(TACHO_PIN); // считываем показания таходатчика
myPID.Compute(); // здесь происходят вычисления пид-регулятора - то есть pwmOut
analogWrite(PWM_PIN, pwmOut);// получаем выходной сигнал ШИМ
}
Это часто очень полезно в проектах, где используются моторизованные платформы или роботы. Мы просто должны подключить его к тому, что мы хотим и готовы. Мы должны быть осторожны с полярностью. Если мы подключим его назад, то есть жить в нейтральной и наоборот, когда мы скажем, что он идет вперед, он вернется. То же самое произойдет с размещением двигателя.
На следующей диаграмме вы видите базовое соединение. Давайте загрузим образец кода, который поставляется с установленной нами библиотекой. Эти два шага такие же, как и в шаговом двигателе. Если вам нужна дополнительная информация, вы можете посмотреть ее.
В результате получилось очень даже неплохо - регулируются обороты двигателя с поддержанием мощности. Снял по этому поводу видео -