24.02.2016
![]()
Хит продаж
Позволяет управлять двигателями без потери мощности.Обязательным условием при этом является наличие таходатчика (тахогенератор) на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует. Если вы начинаете нагружать двигатель, частота вращения вала естественно начнет падать, что так же будет фиксировать таходатчик. Теперь рассмотрим дальше. Сигнал с этого таходатчика поступает на микросхему, она видит это и дает команду силовым элементам, добавить напряжение на электромотор.Таким образом, когда вы надавили на вал (даете нагрузку), плата автоматически прибавила напряжение и мощность на этом валу возросла. И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется "Плата регулировки оборотов коллекторных двигателей без потери мощности".
Помните, что значение может быть между 0 и если вы пройдете 0, тогда двигатель остановится, и если вы пройдете 255, то он будет работать на полной скорости. Если вы передадите значение от 1 до 254, тогда скорость двигателя будет изменяться соответствующим образом. Вы можете просто повторно использовать ту же схему с прошлой недели.
Вместо того, чтобы устанавливать контакты отдельно, вы можете вызвать следующие направления, чтобы изменить направление двигателей. Примечание. На следующей неделе мы увидим, как мы можем собрать все, что мы изучили, и построить полноценного бота. Он будет существующим, так что не пропустите его 😉.
Но мы увидели одну особенность, что эта плата применима только для коллекторных электродвигателей (с электрическими щетками). Конечно такие моторы в быту встречаются намного реже чем асинхронные. Но они нашли широкое применение в стиральных машинах автомат. Вот именно по этому была изготовлена эта схема. Специально для электродвигателя от стиральной машины автомат. Их мощность достаточно приличная, от 200 до 800 ватт. Что позволяет достаточно широко применить их в быту.
Производная часть уравнения действует на влажные колебания или резкие изменения в управляющем сигнале. Вот код для используемого уравнения. Константы усиления устанавливаются в коде, но могут быть программированы через какой-либо другой интерфейс. В этом случае это желаемое положение за вычетом фактического положения.
Аналогично, если мой сигнал ошибки равен 0, то термин Р не влияет на двигатель. Аккумулятор суммирует сигналы ошибки со временем. В некоторых системах важно предотвратить «зависание» аккумулятора. Иногда полезно хранить ваши измерения ошибок в массиве и использовать в качестве последней ошибки что-то еще немного назад во времени.
Запись опубликована и помечена. Чтобы получить контроль над скоростью вашего двигателя, когда вам это нужно, вам нужно добавить потенциометр в свою схему. Найдите место на макете, чтобы поместить свой потенциометр. Когда это делается при загрузке, вы можете контролировать свой мотор с помощью потенциометра. Поворот потенциометра в одном направлении заставляет двигатель ускоряться; превращение его другим способом заставляет его замедляться.
Как всегда, вы указываете различные переменные, используемые в эскизе. Вы можете обнаружить, что есть минимальная скорость, после которой двигатель будет просто гудеть. Он делает это, потому что у него недостаточно энергии для вращения. Начиная с вашего потенциометра, считывающего значение 0, поверните потенциометр очень медленно, пока не начнется завиток, и двигатель начнет вращаться. Крошечные оптимизации, подобные этому, могут помочь вашему проекту работать плавно, без каких-либо потерь или значений. Эти устройства имеют 61-дюймовый выходной вал диаметром 6 мм. 1 × Макетная доска. Первоначально это была буквально хлебная доска, полированная кусок дерева, используемый для нарезки хлеба Поскольку паяльная мачта не требует пайки, ее можно использовать повторно, что упрощает ее использование для создания временных прототипов и экспериментов с дизайном схем. По этой причине паяльные макеты также чрезвычайно популярны среди студентов и в технологическом образовании. не имело этого свойства. Разделочные и аналогичные печатные платы прототипов, которые используются для создания полупостоянных паяных прототипов или одноразовых, не могут быть легко использованы повторно. Различные электронные системы могут быть прототипированы с использованием макетов, от небольших аналоговых и цифровые схемы для завершения центральных процессоров.
- Если вы не видите прокрутку списка, убедитесь, что выбрана опция автопрокрутки.
- Запишите значение, отображаемое в этот момент.
- Макет - это основа для прототипирования электроники.
Данный продукт, уже нашел широкое применение в хозяйстве людей и широко охватил лиц занимающихся различным хобби и профессиональной деятельностью.
Отвечая на вопрос - Куда можно применить двигатель от стиральной машины? Был сформирован некоторый список. Самодельный токарный станок по дереву; Гриндер; Электропривод для бетономешалки; Точило; Электропривод для медогонки; Соломорезка; Самодельный гончарный круг; Электрическая газонокосилка; Дровокол и много другое где необходимо механическое вращение каких либо механизмов или предметов. И во всех этих случаях нам помогает эта плата "Регулировки оборотов электродвигателей с поддержанием мощности на TDA1085".
В этом коде ошибка производной является последним сигналом ошибки минус 10-я предыдущая ошибка. Это значение необходимо масштабировать до значения, которое соответствует диапазону широтно-импульсной модуляции для контроллера. Это просто более быстрый способ выполнить одно и то же.
Почему люди используют Arduino для управления трехфазным асинхронным мотором?
Для чего-то вроде общего контроллера положения двигателя, использующего аналоговые сигналы, вы можете начать с настройки ваших пропорциональных настроек, пока не получите грубый контроль. Если ваш пропорциональный термин слишком высок, движение будет резким и изменчивым.
Это нажатие является непрерывным и представлено в первой волне фигуры. Во втором и третьем случаях кнопка нажата еще меньше времени по сравнению с первым случаем. Из-за этого пониженного напряжения скорость двигателя еще больше уменьшается. Это снижение скорости с непрерывным рабочим циклом до тех пор, пока точка, где напряжение на двигателе не будет достаточным для вращения двигателя.
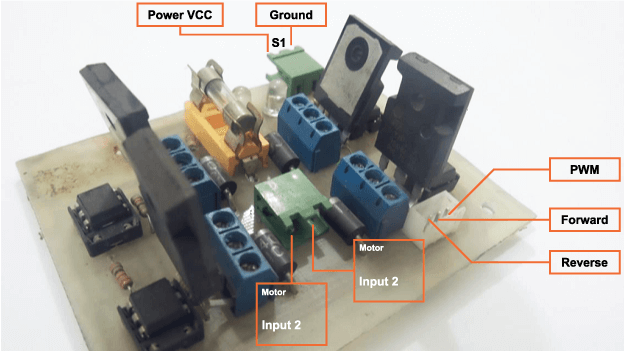
Схема подключения к Ардуино Уно
Теперь в приведенном выше рисунке 1 есть четыре переключателя. Из-за этого ток протекает через двигатель справа налево, как показано на 2-й части рисунка. Теперь рассмотрим, как двигатель вращается по часовой стрелке. Ток через двигатель протекает слева направо, как показано на 1-й части рисунка. Это направление тока противоположно первому, и поэтому мы видим противоположный потенциал на клемме двигателя к первому, так что двигатель вращает анти-часы мудрый. Так, как показано на рисунке выше, для вращения по часовой стрелке 2А должно быть высоким, а 1А должно быть низким.
Краш-тест платы регулировки оборотов
Позволяет управлять двигателями без потери мощности.Обязательным условием при этом является наличие таходатчика (тахогенератор) на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует. Если вы начинаете нагружать двигатель, частота вращения вала естественно начнет падать, что так же будет фиксировать таходатчик. Теперь рассмотрим дальше. Сигнал с этого таходатчика поступает на микросхему, она видит это и дает команду силовым элементам, добавить напряжение на электромотор.Таким образом, когда вы надавили на вал (даете нагрузку), плата автоматически прибавила напряжение и мощность на этом валу возросла. И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется "Плата регулировки оборотов коллекторных двигателей без потери мощности".
Аналогично для против часовой стрелки 1А должен быть высоким, а 2А должен быть низким. Схема подключена в макете согласно приведенной выше электрической схеме. Хотя кнопки показывают эффект отскока в этом случае, это не вызывает значительных ошибок, поэтому на этот раз нам не нужно беспокоиться.
Мы будем увеличивать и уменьшать это число нажатием кнопки. Они используются в промышленных системах управления всех типов. Вообще говоря, пропорциональная часть алгоритма управления обеспечивает большую часть «толчка», чтобы заставить вещи двигаться. Интегральный термин используется для небольших ошибок и постепенного изменения со временем.
Но мы увидели одну особенность, что эта плата применима только для коллекторных электродвигателей (с электрическими щетками). Конечно такие моторы в быту встречаются намного реже чем асинхронные. Но они нашли широкое применение в стиральных машинах автомат. Вот именно по этому была изготовлена эта схема. Специально для электродвигателя от стиральной машины автомат. Их мощность достаточно приличная, от 200 до 800 ватт. Что позволяет достаточно широко применить их в быту.
Производная часть уравнения действует на влажные колебания или резкие изменения в управляющем сигнале. Вот код для используемого уравнения. Константы усиления устанавливаются в коде, но могут быть программированы через какой-либо другой интерфейс. В этом случае это желаемое положение за вычетом фактического положения.
Аналогично, если мой сигнал ошибки равен 0, то термин Р не влияет на двигатель. Аккумулятор суммирует сигналы ошибки со временем. В некоторых системах важно предотвратить «зависание» аккумулятора. Иногда полезно хранить ваши измерения ошибок в массиве и использовать в качестве последней ошибки что-то еще немного назад во времени.
Запись опубликована и помечена. Чтобы получить контроль над скоростью вашего двигателя, когда вам это нужно, вам нужно добавить потенциометр в свою схему. Найдите место на макете, чтобы поместить свой потенциометр. Когда это делается при загрузке, вы можете контролировать свой мотор с помощью потенциометра. Поворот потенциометра в одном направлении заставляет двигатель ускоряться; превращение его другим способом заставляет его замедляться.
Как всегда, вы указываете различные переменные, используемые в эскизе. Вы можете обнаружить, что есть минимальная скорость, после которой двигатель будет просто гудеть. Он делает это, потому что у него недостаточно энергии для вращения. Начиная с вашего потенциометра, считывающего значение 0, поверните потенциометр очень медленно, пока не начнется завиток, и двигатель начнет вращаться. Крошечные оптимизации, подобные этому, могут помочь вашему проекту работать плавно, без каких-либо потерь или значений. Эти устройства имеют 61-дюймовый выходной вал диаметром 6 мм. 1 × Макетная доска. Первоначально это была буквально хлебная доска, полированная кусок дерева, используемый для нарезки хлеба Поскольку паяльная мачта не требует пайки, ее можно использовать повторно, что упрощает ее использование для создания временных прототипов и экспериментов с дизайном схем. По этой причине паяльные макеты также чрезвычайно популярны среди студентов и в технологическом образовании. не имело этого свойства. Разделочные и аналогичные печатные платы прототипов, которые используются для создания полупостоянных паяных прототипов или одноразовых, не могут быть легко использованы повторно. Различные электронные системы могут быть прототипированы с использованием макетов, от небольших аналоговых и цифровые схемы для завершения центральных процессоров.
- Если вы не видите прокрутку списка, убедитесь, что выбрана опция автопрокрутки.
- Запишите значение, отображаемое в этот момент.
- Макет - это основа для прототипирования электроники.
Данный продукт, уже нашел широкое применение в хозяйстве людей и широко охватил лиц занимающихся различным хобби и профессиональной деятельностью.
Отвечая на вопрос - Куда можно применить двигатель от стиральной машины? Был сформирован некоторый список. Самодельный токарный станок по дереву; Гриндер; Электропривод для бетономешалки; Точило; Электропривод для медогонки; Соломорезка; Самодельный гончарный круг; Электрическая газонокосилка; Дровокол и много другое где необходимо механическое вращение каких либо механизмов или предметов. И во всех этих случаях нам помогает эта плата "Регулировки оборотов электродвигателей с поддержанием мощности на TDA1085".
В этом коде ошибка производной является последним сигналом ошибки минус 10-я предыдущая ошибка. Это значение необходимо масштабировать до значения, которое соответствует диапазону широтно-импульсной модуляции для контроллера. Это просто более быстрый способ выполнить одно и то же.
Почему люди используют Arduino для управления трехфазным асинхронным мотором?
Для чего-то вроде общего контроллера положения двигателя, использующего аналоговые сигналы, вы можете начать с настройки ваших пропорциональных настроек, пока не получите грубый контроль. Если ваш пропорциональный термин слишком высок, движение будет резким и изменчивым.
Это нажатие является непрерывным и представлено в первой волне фигуры. Во втором и третьем случаях кнопка нажата еще меньше времени по сравнению с первым случаем. Из-за этого пониженного напряжения скорость двигателя еще больше уменьшается. Это снижение скорости с непрерывным рабочим циклом до тех пор, пока точка, где напряжение на двигателе не будет достаточным для вращения двигателя.
Схема подключения к Ардуино Уно
Теперь в приведенном выше рисунке 1 есть четыре переключателя. Из-за этого ток протекает через двигатель справа налево, как показано на 2-й части рисунка. Теперь рассмотрим, как двигатель вращается по часовой стрелке. Ток через двигатель протекает слева направо, как показано на 1-й части рисунка. Это направление тока противоположно первому, и поэтому мы видим противоположный потенциал на клемме двигателя к первому, так что двигатель вращает анти-часы мудрый. Так, как показано на рисунке выше, для вращения по часовой стрелке 2А должно быть высоким, а 1А должно быть низким.
Краш-тест платы регулировки оборотов
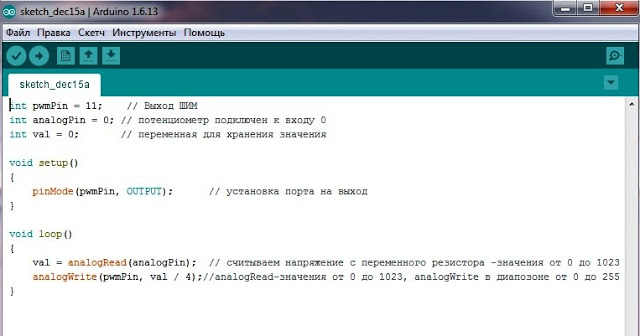
Для наших целей понадобится один аналоговый вход - А0, который используем для подключения переменного резистора, а также один выход ШИМ - возьмём 11. Соберём простую схему:
Затем увеличьте свой интегральный термин до достижения конечного желаемого положения. Интегральный член обычно намного меньше пропорционального. Слишком высокий интегральный термин приведет к колебаниям двигателя. Слишком низко, и это не имеет никакого влияния. Если ваш двигатель имеет тенденцию дребезжать, вам может потребоваться добавить какое-то детектирование обрыва, как обсуждалось выше.
Это верно при точности около 1% или 5 градусов при одном вращении. Не супер быстрый, но он, безусловно, работает для многих приложений. Вот весь код вместе. Если вы подключите эти два провода непосредственно к батарее, двигатель будет вращаться. Если вы переключаете провода, двигатель вращается в противоположном направлении.

И напишем простую программу для управления яркостью светодиода, подключённого к 11 выходу ШИМ. Регулировать будем переменным резистором, который подключен к аналоговому входу А0.
Его текущий рейтинг составляет 2А для каждого двигателя. Однако при этих токах вам необходимо использовать радиаторы. 
Штыри 5 и 7 являются цифровыми, т.е. Это будет контролировать скорость двигателя. Ниже приведена фотография созданного. 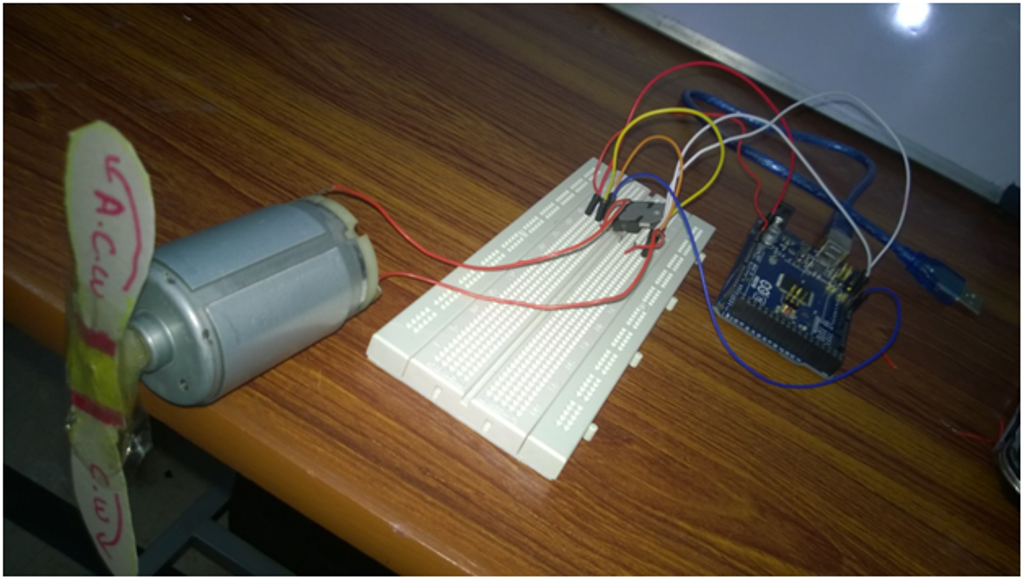
В дополнение к простому вращению двигателя вы можете управлять положением вала двигателя, если двигатель имеет поворотный датчик. Любое изменение магнитной среды катушки провода приведет к «индуцированию» напряжения в катушке.

Получаем первый результат - яркость светодиода изменяется с помощью переменного резистора. Для управления какой-нибудь силовой нагрузкой включённой в сеть 220 вольт такой ШИМ тоже сгодится, только желательно сделать гальваническую развязку между силовой частью и Arduino. Можно взять готовый кусочек схемы из предыдущей страницы
Это объясняет, как генераторы могут создавать напряжение. Это механическая энергия для преобразования электрической энергии. Двигатели работают в обратном порядке от генераторов; они преобразуют электрическую энергию в механическую. В двигателях ток подается в обмотку якоря, что создает магнитное поле, которое взаимодействует с магнитным полем, создаваемым постоянными магнитами в статоре. Взаимодействие между двумя магнитными полями приводит к вращению якоря.
Существует много различных типов двигателей, в том числе. Чтобы определить положение вала с помощью инкрементного датчика, вы должны знать начальное положение и использовать внешнюю схему для подсчета количества выходных импульсов. Вам нужно только прочитать цифровой выход энкодера.
- Инкрементный роторный датчик выдает импульсы только во время вращения двигателя.
- Абсолютные энкодеры.
- Абсолютный поворотный датчик выдает цифровой код, соответствующий углу поворота.
- Нет необходимости подсчитывать импульсы, чтобы знать положение вала двигателя.

Провёл небольшие испытания этого ШИМ-регулятора - сначала как обычно подключил активную нагрузку (лампочку накаливания) а затем и коллекторный двигатель. Всё работает. Снял видео -
#define PWM_PIN 11 // выход ШИМ
#define SET_PIN 0 // установка оборотов 0-5 вольт мин-макс
#define TACHO_PIN 1 // сигнал от таходатчика 0-5 вольт мин-макс
Код для проверки кодировщика вручную
Этот тип управления скоростью называется широтно-импульсной модуляцией. Двигатель работает на полной скорости, когда рабочий цикл составляет 100%. Однако, когда рабочий цикл равен 0%, двигатель останавливается и больше не будет двигаться. 















Соединения показаны ниже. 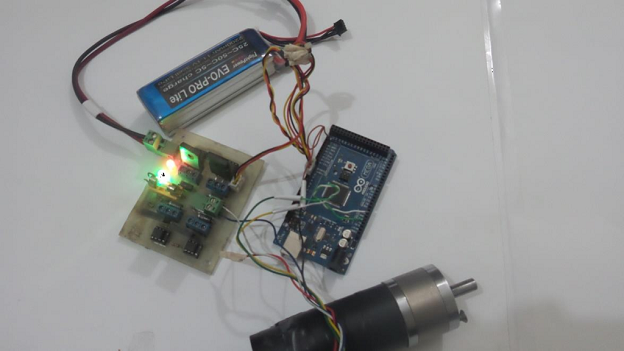


Код для запуска двигателя до определенного энкодера
Кодеры - это устройства, которые могут быть подключены к любому вращающемуся или линейному устройству для отслеживания движения и ориентации устройства. Здесь мы использовали абсолютный поворотный датчик для управления скоростью двигателя и положением вала.Void setup() {
myPID.SetMode(AUTOMATIC);
}
void loop() {
pwmOut = constrain (pwmOut , 0, 250); // это необязательно - по умолчанию 0-255
pwmSet = analogRead(SET_PIN); // считываем показания потенциометра регулировки скорости
pwmSpeed = analogRead(TACHO_PIN); // считываем показания таходатчика
myPID.Compute(); // здесь происходят вычисления пид-регулятора - то есть pwmOut
analogWrite(PWM_PIN, pwmOut);// получаем выходной сигнал ШИМ
}
В результате получилось очень даже неплохо - регулируются обороты двигателя с поддержанием мощности. Снял по этому поводу видео -

