Исследование двигателя постоянного тока независимого возбуждения
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.
Рис. 1. Внешний вид двигателя постоянного тока

Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы ; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями и . Как правило, . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы r д и r р (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением . Такие ДПТ называют двигателями параллельного возбуждения . Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
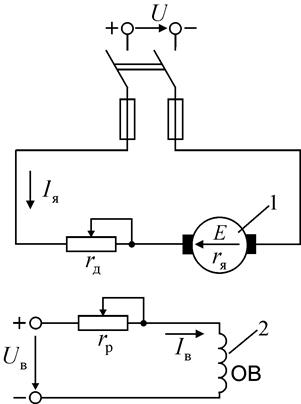
Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток I я, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки М с якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U , поэтому с ростом скорости w ток I пусковой ток якоря , как следует из формулы (3), ограничивается только сопротивлением якорной цепи r я (при r д =0)
Значение сопротивления относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U . Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е . Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U , при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
Двигатели постоянного тока (ДПТ) широко применяются в промышленных, транспортных и других установках, где необходимо плавное регулирование скорости вращения (прокатные станы, металлорежущие станки, электрическая тяга на транспорте и. т. п.). В зависимости от способа электромагнитного возбуждения ДПТ подразделяют на ДПТ с независимым, последовательным и смешанным возбуждением. Иногда встречается название ДПТ с параллельным возбуждением, но необходимо учесть, что такой ДПТ является частным случаем ДПТ с НВ и этот термин применяется как доопределяющий.
Схема включения ДПТ с независимым возбуждением (ДПТ с НВ) приведена на рис. 2.1. Для ДПТ с НВ справедлива система уравнений, описывающая его статическое состояние:
Е=с ; (1.1)
М=сI ;
где U - напряжение на якорной цепи, В; R - суммарная сопротивление якорной цепи, Ом; М - электромагнитный момент, Нм; I -ток якоря, А; - угловая скорость двигателя, рад/с; Е - ЭДС вращения якоря, В; с = кФ - коэффициент пропорциональности, Вс; к = pN/2na - постоянная ДПТ (р - число пар полюсов; N - число активных проводников якорной обмотки; а - число пар параллельных ветвей якорной обмотки) Ф - магнитный поток, Вб.
Решая первые два уравнения в системе (1.1) относительно Е, можно получить известное уравнение электромеханической характеристики ДПТ
![]() ,
(1.2)
,
(1.2)
= f(I).
С учетом третьего уравнения в (1.1) уравнение (1.2) можно переписать в виде зависимости w=f(M) которая определяет механическую характеристику ДПТ:
 ,
(1.3)
,
(1.3)
![]() (1.4)
(1.4)

Рисунок 1.1 - Схема включения ДПТ с НВ
которое определяет зависимость = f(I).
Данное уравнение механической характеристики определяет зависимость скорости вращения от момента на валу двигателя, т.к. в статике вращающий момент равен моменту сопротивления Мс на валу ДПТ, то это уравнение определяет зависимость от Мс, прикладываемого к валу.
Стоит сказать, что здесь мы оперируем величиной электромагнитного момента М, который превышает выходной момент на валу на величину, соответствующую потерям в стали и механическим потерям от трения, но в большинстве практических расчетов можно считать, что эти моменты равны. Коэффициент пропорциональности с = кФ можно считать постоянным для тех ДПТ с НВ, у которых имеются компенсационные обмотки или в случае, когда можно пренебречь влиянием реакции якоря на величину Ф. Вообще-то влияние поперечной реакции якоря на Ф ведет к нарушению линейности механической характеристики по мере увеличения тока.
Из анализа уравнения электромеханической характеристики (формула 1.2) видно, что она может быть представлена прямой линией (рис. 1.2) при неизменных напряжении U, магнитном потоке Ф, создаваемом ОВ и сопротивлением якорной цепи R. Если U = U ном, Ф = Ф ном и R д = 0, электромеханическая характеристика называется естественной. При изменении хотя бы одного из указанных параметров электромеханическая характеристика называется искусственной. Таким образом, можно отметить, что ДПТ с НВ обладает лишь одной естественной характеристикой и множеством искусственных.
Нетрудно видеть, что в случае, если I=0, имеет место режим идеального холостого хода и при этом = = U/кФ == U/c , т.е. и .
С увеличением нагрузки на валу ДПТ возрастает и ток якоря I, т.к. М == сI, а это в свою очередь ведет к падению . В случае, если = 0, то при подведенном к якорю напряжении имеет место режим короткого замыкания, при котором из уравнения (1.2) следует, что I кз = U/R . Максимальное значение тока короткого замыкания имеет место при R д = 0, когда R = R я (R я - собственное сопротивление обмотки якоря), и оно может в десятки раз превышать величину I н двигателя, т.к. I я величина достаточно малая. Реально режим короткого замыкания имеет место, кратковременно, при пуске двигателя и при стопорении двигателя моментом сопротивления.

Рисунок 1.2 - Механическая и электромеханическая характеристики ДПТ с НВ
При прямом пуске двигателя ударные значения тока I кз >>I н, поэтому якорная обмотка может быстро перегреться и выйти из строя, кроме того, большие токи негативно влияют и на работоспособность щеточно-коллекторного узла. Cказанное обуславливает необходимость ограниченияI кз до какой-либо приемлемой величины, либо введением дополнительного сопротивления в якорную цепь R д, либо уменьшением питающего напряжения U. Величина максимально допустимого тока определяется коэффициентом перегрузки по току К т, обычно принимающим значения от 2 до 5, в зависимости от типа двигателя. Максимально допустимый ток короткого замыкания должен соответствовать неравенству:
![]() .
(1.5)
.
(1.5)
Для микродвигателей обычно осуществляется прямой пуск без добавочных сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск, особенно если привод с ДПТ используется в напряженных режимах с частыми пусками и торможениями. Практически надо помнить, что только частыми пусками можно «сжечь» ДПТ, если конечно не ограничивать пусковые токи. С введением R д в цепь якоря жесткость электромеханической характеристики уменьшается, что и видно из рисунка 1.2.
Из выражения (1.4) следует, что графически механическая характеристика ДПТ с НВ может быть представлена прямой линией с двумя характерными точками - скоростью холостого хода w о и моментом короткого замыкания М кз, который также называется пусковым. Величина М кз определяется как М кз = сI кз = кФU/R . С введением добавочного сопротивления R д в цепь якоря жесткость механических характеристик также падает, что с успехом используется при регулировании скорости вращения.
Уравнения механической характеристики можно переписать в виде:
![]() ,
(1.6)
,
(1.6)
где = MR/ (кФ) = MR/c - перепад скорости, a R = R я + R д.
С учетом пропорциональной связи между I и М следует, что график механической и электромеханической характеристик один и тот - же при соответствующем масштабировании по оси абсцисс величин I и М, поэтому часто обозначение по оси абсцисс приводится как М (I).
Из уравнения механической характеристики (1.4) следует, что принципиально может регулироваться изменением напряжения U, магнитного потока Ф, создаваемого ОВ, и сопротивления якорной цепи R.
Одним из основных показателей, характеризующих способы регулирования скорости является диапазон регулирования D, который в электроприводе определяется как отношение максимальной скорости вращения max к минимальной min
D = . (1.7)
Как правило, диапазон регулирования представляют в числах в виде соотношения, например100:1 и т.д. Естественно, диапазон регулирования увязывается с требуемой стабильностью скорости при заданном отклонении момента.
Как следует из выражения (1.4), при изменении питающего напряжения можно получить семейство параллельных механических характеристик (рис. 1.3).
Практически имеется возможность только уменьшать напряжение питания якоря относительно его номинального значения U н, т.е. при регулировании скорости изменением U должно выполнятся неравенство:
U U н , (1.8)
при этом скорость вращения можно регулировать только вниз от основной, соответствующей естественной характеристике. Это обусловлено тем, что уже на стадии своего проектирования ДПТ рассчитывается на конкретное номинальное напряжение, и превышение которого может привести к пробою изоляции. Напряжение на якоре может регулироваться различными электромашинными и статическими устройствами.
|


Рисунок 1.3 - Механические характеристики ДПТ с НВ при различных напряжениях на якоре U ном >U 1 >U 2
Из уравнения механической характеристики (1.4) следует, что, например, при постоянном моменте сопротивления М с на валу можно получить различные установившиеся угловые скорости ниже основной введением в цепь якоря добавочного сопротивления (рис. 1.1). Жесткость механических характеристик уменьшается с увеличением величины добавочного сопротивления R д. Диапазон регулирования скорости практически не превышает 2:1. Способ характеризуется большими тепловыми потерями на добавочном сопротивлении R д.
При введении добавочного сопротивления R в в цепь обмотки возбуждения можно изменять величину магнитного потока двигателя Ф в сторону уменьшения от его номинального значения Ф н, которое достигается при R в = 0.
Как нетрудно видеть из уравнения электромеханической характеристики (1.2), для различных значений потока Ф можно получить семейство электромеханических характеристик, представленное на рис. 1.4.
Угловая скорость идеального холостого хода w 0 определяется следующим выражением: . На рис. 1.4 нижняя характеристика соответствует номинальному потоку возбуждения Ф н. Если при этом добавочное сопротивление в якорной цепи R д равно 0 и якорь запитывается номинальным напряжением U н,то эта характеристика будет естественной. При уменьшении величины потока возбуждения угловые скорости вращения холостого хода возрастают. Ток короткого замыкания при этом остается неизменным.
Момент ДПТ определяется выражением (1.1), поэтому с уменьшением величины потока возбуждения Ф уменьшается и соответствующий пусковой момент М кз. На рис. 1.5 представлены механические характеристики для различных значений потоков. Практически этот способ используется только для регулирования угловой скорости вращения вверх от основной. Экономически целесообразно регулировать угловую скорость вращения при токе якоря равном номинальному, но при этом номинальные значения моментов будут различными для различных значений величины потока Ф. Точки, соответствующие номинальным моментам двигателя будут лежать на гиперболической кривой, обозначенной пунктирной линией на рис. 1.5.

Рисунок 1.4 - Характеристики ДПТ с НВ при изменении магнитного потока ![]() .
.
|

Рисунок 1.5 - Характеристики ДПТ с НВ при изменении магнитного потока ![]() .
.
Согласно принципу обратимости двигатель может работать помимо двигательного и в генераторных режимах. Генераторный режим работы электродвигателя относятся к торможению электродвигателя. Различают следующие генераторные (тормозные) режимы:
Торможение с отдачей энергии в сеть (рекуперативное);
Динамическое торможение;
Торможение противовключением.
Если сторонним устройством разогнать ДПТ с НВ до скорости выше скорости холостого хода, то он начинает работать генератором, включенным параллельно с сетью, отдавая ей электрическую энергию. Ток якоря при этом изменяет свой знак, т.к. Е > U и ДПТ переходит в тормозной режим с моментом М т = - М.
В этом случае уравнение механической характеристики может быть представлено как
= U/c + M т R/c 2 (1.9)
Нетрудно видеть, что графически зависимость == f(M т) в данном случае является продолжением механической характеристики двигательного режима и изображается во 2 или 4 квадратах (рис. 1.6). Данный тормозной режим весьма экономичный и широко применяется в промышленности и на транспорте при некоторых способах регулирования скорости, например при регулировании скорости вращения изменением питающего напряжения U.
![]()
Рисунок 1.6 - Механические характеристики ДПТ в режиме рекуперативного торможения (R д2 >R д1).
Но данный режим работы ДПТ может применяться только при работе электродвигателя на скоростях больших скорости идеального холостого хода w 0 .
При работе ДПТ с НВ в режиме генератора независимо от сети или в режиме динамического торможения якорную цепь электродвигателя отключают от сети и замыкают её на тормозное сопротивление (рис. 1.7).
Уравнение механической характеристики для этого режима запишется как
=М т R/с 2 (1.10)
где М т - тормозной момент, R - сопротивление якорной цепи. R = R я + R p .
Ток якоря можно определить как
I=-E/R, (1.11)
т.е. он изменяет свой знак, чем и обуславливается процесс торможение.
Способ динамического торможения достаточно экономичный, т.к. двигатель работает генератором на постоянную нагрузку, потребляя из сети энергию только на электромагнитное возбуждение. При переводе ДПТ из двигательного режима в режим динамического торможения ограничивают величину максимального тормозного тока в момент переключения.
Режим генератора последовательно с сетью или режим торможения противовключением имеет место тогда, когда обмотки двигателя включены для вращения в одну сторону, но под действием внешнего момента или сил инерции ротор вращается в противоположную сторону.
При превышении активным моментом сопротивления величины пускового момента имеет место тормозной спуск, что приводит к изменению направления вращения якоря двигателя и соответственно знака ЕДС. Из первого уравнения системы (1.1) следует, что в этом случае ток якоря определяется как I=(U+E)/R, т.е. ток якоря превышает значения токов короткого замыкания.

Рисунок 1.7 - Схема включения ДПТ в режиме динамического торможения.
На рис. 1.8 представлены механические характеристики режима динамического торможения.

Рисунок 1.8 - Характеристики динамического торможения ДПТ с НВ.
Поэтому для реализации этого режима необходимо ограничивать ток якоря введением добавочного сопротивления R д. Графически механические и электромеханические характеристики в этом случае являются продолжением соответствующих характеристик в 4 квадрант (рис. 1.9).
Если у ДПТ, работающего в двигательном режиме изменить полярность напряжения на обмотке якоря на противоположную, то знак тока якоря I изменится на противоположный в соответствии с выражением I=-(U+E)/R . Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте. При этом происходит интенсивное торможение и скорость вращения двигателя падает до нуля. Если в этот момент времени обмотку якоря не отключить от сети, то направление вращения изменится на противоположное, т.е. двигатель реверсируется. С энергетической точки зрения данный способ не экономичен, т.к. большое количество энергии выделяется на добавочном сопротивлении, которое необходимо включать в якорную цепь для ограничения бросков тормозного тока. Механические характеристики для этого режима торможения представлены на рис. 1.10.
Изменение момента сопротивления М с ;
изменение момента на алу двигателя М , то есть переход привода с одной характеристики на другую, имеющий место при пуске, торможении, реверсе, регулировании скорости, изменении какого-либо параметра привода.
Необходимость в изучении переходных процессов возникает в связи с тем, что производительность ряда ответственных механизмов (например, реверсивного прокатного стана) определяется быстротой протекания переходных процессов; качество выполнения многих технологических операций определяется переходными процессами (движение лифта, врезание резца в деталь и т.п.); механические и электрические перегрузки оборудования в большинстве случаев определяются переходными процессами. Основная задача при изучении переходных процессов сводится к определению зависимостей w(t), M(t) и i(t) для любых конкретных приводов в любых условиях.
Мгновенный наброс и сброс нагрузки, пуск, реверс, торможение – вот круг задач которые приходится решать при исследовании переходных режимов. При этом основным фактором, влияющим на переходной процесс, является механический момент инерции (J ). Такие электрические параметры, как индуктивность обмоток якоря, индуктивность обмоток возбуждения и т. п., оказывают ничтожно малое влияние на работу электродвигателя в переходных режимах, поэтому при исследовании переходных процессов ими обычно пренебрегают. Фактор, вызывающий переходный процесс, изменяется скачкообразно (мгновенно) то есть много быстрее, чем скорость.
Все переходные процессы подчиняются, очевидно, механическому уравнению движения
![]() (1.13)
(1.13)
Искомые зависимости w(t) и M(t) должны быть получены путем решения этого уравнения при заданных начальных условиях. Конкретные особенности привода отразятся в виде зависимостей M(w) и M с (w) входящих в уравнение.
Рассмотрим поведение привода при следующих условиях:
1. M = const, M с = const


Рисунок 1.11 - Механические характеристики (а) и временные зависимости (б) при М = const и M c = const
Пусть привод работал в точке w нач, М нач = М с (рис. 1.11) некоторой характеристики (она нас не интересует) и в момент времени t = 0 был мгновенном переведен на новую характеристику, показанную на рис. 1.11, а жирной линией.
Уравнение движения привода в переходных режимах (1.13) в этом случае представляет собой дифференциальное уравнение с разделяющимися переменными и его решение имеет вид:
![]() (1.14)
(1.14)
Постоянную интегрирования С найдем из начального условия - при t = 0, w = w нач: w нач = С .
Окончательно будем иметь:
![]() (1.15)
(1.15)
Это решение действует на интервале w нач < w < w кон, так как по условию при w = w кон функция w(М) терпит излом. На этом интервале М =М 1 .
Графики переходного процесса приведены на рис. 1.11,б. При этом время переходного процесса t пп:
 (1.16)
(1.16)
Рассмотренный простейший случай имеет очень большое практическое значение, так как к нему может быть сведено в целях оценки времени и характера переходного процесса большое число конкретных задач.
2. М с = const, M линейно зависит от w, b < 0.
Пусть характеристики двигателя и механизма имеют вид, представленный на рис. 1.12. Уравнение линейной механической характеристики двигателя с отрицательной жесткостью может быть записано как
![]() (1.21)
(1.21)
Итак, мы обнаружили, что в рассматриваемом переходном процессе, как для скорости, так и для момента справедливо одинаковое уравнение вида
![]() , (1.22)
, (1.22)
то есть линейное неоднородное дифференциальное уравнение с постоянной правой частью.
Коэффициент при производной
 (1.23)
(1.23)
называют электромеханической постоянной времени .

Рисунок 1.13 - определение электромеханической постоянной времени Т м
Для выяснения смысла этой величины рассмотрим условный привод с характеристикой, показанной на рис. 1.13. Определив время разгона такого привода
замечаем, что оно выражается так же, как Т м. В связи с этим можно считать, что электромеханическая постоянная времени Т м представляет собою время, за которое привод разогнался бы вхолостую до w = w 0 под действием момента короткого замыкания.
2 Практическая часть
В данной части курсового проекта мы будем строить систему управления точного позиционирования скользящей части стола металлообрабатывающего станка
2.1 Построение структурной схемы АЭП
Данная структурная схема имеет вид:
Рисунок 2.1 – структурная схема электропривода.
Схема состоит из следующих элементов:
панель управления;
ПД-регулятор;
редуктор;
обратная связь по току с отсечкой;
Функциональная часть;
С панели управления сигнал поступает на функциональную часть, которая, в свою очередь, регулирует работу ДПТ для необходимого нам состояния. Система оснащена двумя обратными связями, которые измеряют и подают на функциональную часть значения. Вся система работает на напряжении 110 В, поэтому в ней отсутствуют усилители и преобразователи.
Рассмотрим все части системы в отдельности:
Панель управления. На панели управления находятся кнопки включения и выключения.
Функциональная часть. Она включает в себя сумматор и ПД-ругелятор. ПД-регулятор мы используем из-за того, что стол описывается реально-интегрирующим звеном. Сумматор работает как сравнивающий элемент, он сравнивает значения, которые поступают с обратных связей с задающим воздействием и выдает сигнал ошибки.
Обратные связи:
1. Обратная связь по току включает в себя амперметр и звено нечувствительности, для использования тока с отсечкой.
2. Обратная связь, которая контролирует положение стола будет оснащена реостатным датчиком, так как он более точный и позволяет измерить отрицательное перемещение.
Редуктор. Позволяет преобразовать угловое перемещение в линейное перемещение.
Двигатель постоянного тока – 4ПО100L1 работает на напряжении 110 В, поэтому в схеме отсутствуют преобразователи и усилители.
.Двигатель разгоняется до скорости 10 рад/сек за четыре этапа, время регулирования t=30.5с.

Рисунок 2.4 – ток якоря
Пусковой ток достигает значения 4.7 А.
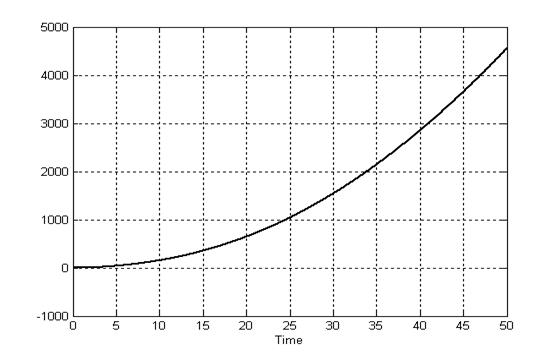
Рисунок 2.5 – график переходного процесса электропривода
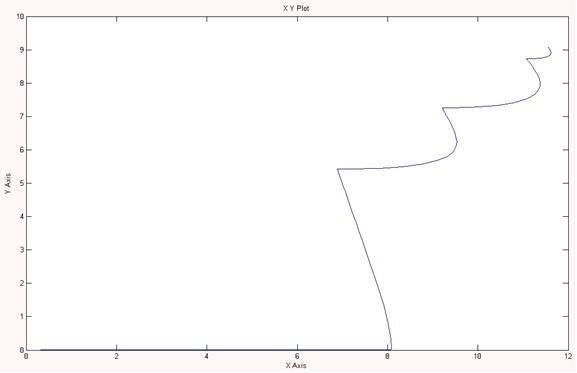
Рисунок 2.6 – механическая характеристика ДПТ
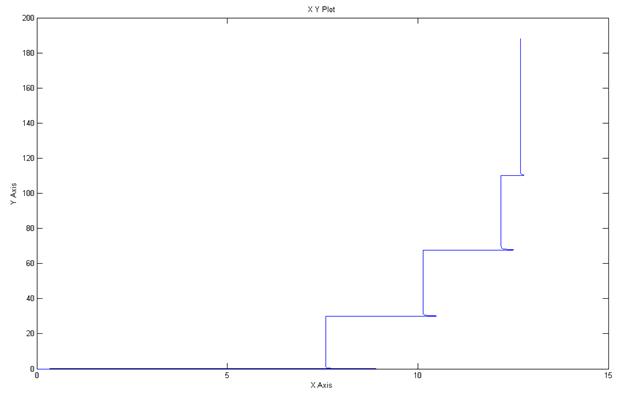
Рисунок 2.7 – механическая характеристика электропривода
2.5 Построение в MatLab схемы управления с регулированием по скорости

Рисунок 2.8 – схема управления электроприводом по скорости

Рисунок 2.9 – угловая скорость вращения ротора
Двигатель разгоняется до скорости 10.54 рад/сек. Время регулирования t=0.7с.

Рисунок 2.10 – ток якоря
Ток якоря достигает установившегося значения 5.46 А

Рисунок 2.11 – график переходного процесса электропривода.
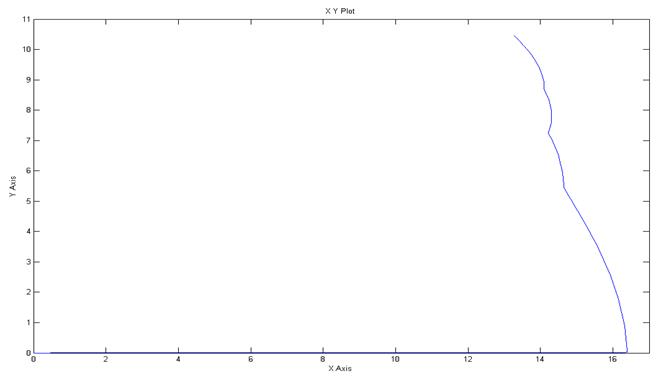
Рисунок 2.12 – механическая характеристика ДПТ
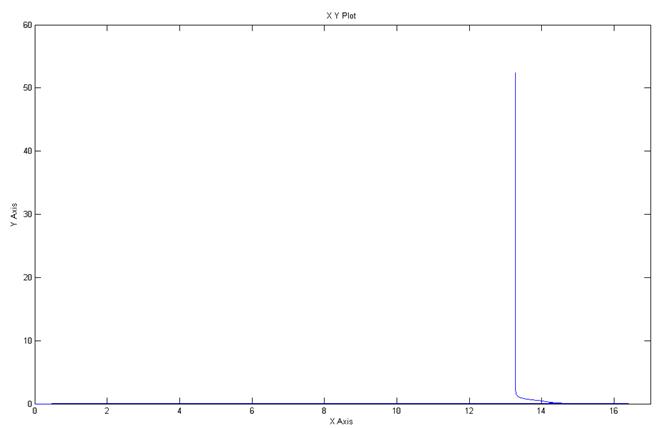
Рисунок 2.13 – механическая характеристика электропривода
2.6 Построение в MatLab схемы управления с ПД-регулятором
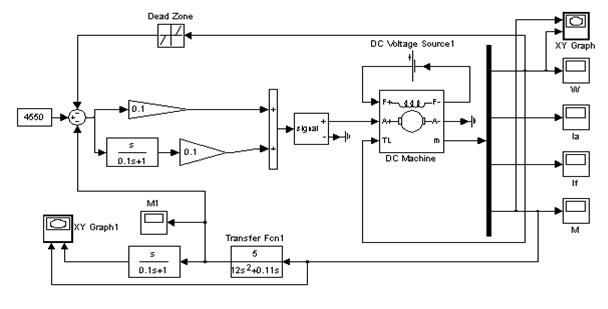
Рисунок 2.14 – схема управления электроприводом при помощи ПД-регулятора
Промоделировав полученную схему, мы получили:
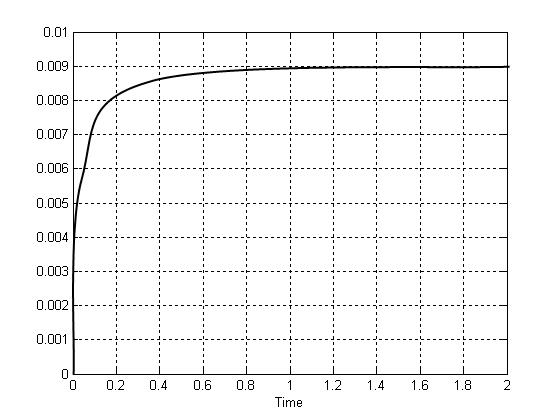
Рисунок 2.15 – угловая скорость вращения ротора
Двигатель с ПД-регулятором разгоняется до скорости 9·10 -3 рад/сек за 1.5 секунды.

Рисунок 2.16 – ток якоря
Значение тока якоря составляет 0.45 А.

Рисунок 2.17 – график переходного процесса электропривода
Переходный процесс достигает установившегося режима за 25 секунд.

Рисунок 2.18 – механическая характеристика ДПТ

Рисунок 2.19 – механическая характеристика электропривода
2.7 Сравнительный анализ разработанных систем управления
Для выбора наиболее оптимальной схемы мы должны сравнить все параметры и определить наиболее подходящую. Так, например, пусковые токи в первой и второй схемах примерно равны – 4.7 А и 5.46 А соответственно, а в третьей схеме он равен 0.45 А, хотя мы поставили для уменьшения пускового тока звено нечувствительности, но уменьшать ток еще больше не рационально.
Проанализировав все результаты, я решил, что схема пуска двигателя по скорости является наиболее оптимальной, для нашей системы.
Хотя она и обладает относительно большим пусковым током 5.46 А, зато в ней самое маленькое время регулирования 0.5 с.
В данном курсовом проекте я разработал систему автоматического управления электроприводом точного позиционирования скользящей части стола металлообрабатывающего станка с двигателем постоянного тока. Были разработано три системы управления: релейная система, система регулирования по скорости и система регулирования с ПД-регулятором. Также были построены в среде Simulink имитационные модели для каждой из систем. После моделирования я получил графики выходных характеристик электропривода и по этим данным сделал анализ систем и выбрал лучшую.
Для регулирования электропривода наиболее выгодно использовать регулирование по скорости, так как этот вид регулирования обладает самыми оптимальными для нашей системы характеристиками.
Список использованных источников и литературы
1. Дементьев Ю.Н., Чернышев А.Ю., Чернышев И.А. «Автоматизированный электропривод: Учебное пособие» – Томск: Изд-во ТПУ, 2009. – 224 с.
2. http://freepapers.ru
3. http://energo20.ru
4. О. О. Осьмачко «Лабораторный практикум по дисциплине «Автоматизированный электропривод» - Харьков: ХНАДУ, 2008.-40 с.
5. Конспект лекций по дисциплине «Автоматизированный электропривод».
Механические характеристики и способы регулирования скорости двигателей постоянного тока последовательного и смешанного возбуждения
4.1 Электромеханические и механические характеристики ДПТ последовательного возбуждения (ПВ)
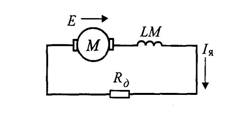
Схема подключения ДПТ ПВ приведена на рис. 4.1. В отличие от ДПТ независимого возбуждения здесь обмотка возбуждения ОВМ включена последовательно с якорем и через ОВМ протекает ток якоря I я.
Исходные выражения для электромеханической, механической характеристик и момента ДПТ ПВ можно записать в том же виде, что и для ДПТ независимого возбуждения (см. уравнения (2.3) - (2.5)):
ω д
= ![]() ; ω д
=
; ω д
= ![]() ; (4.1)
; (4.1)
М = сФI я.
В отличие от ДПТ НВ в этих выражениях сопротивление R я включает в себя и сопротивление обмотки возбуждения. Второе, наиболее важное отличие, заключается в том, что магнитный поток Φ является функцией тока якоря. Зависимость магнитного потока Φ от тока не является аналитической кривой (рис. 4.2), что не позволяет получить аналитические выражения для электромеханической и механической характеристик ДПТ ПВ. Приведенные уравнения позволяют провести лишь качественный анализ.
Естественные электромеханическая и механическая характеристики двигателя показаны на рис. 4.2, рис. 4.3, кривые 1. Очевидно, что при I я =0 магнитный поток также равен нулю, и угловая скорость за счет первого слагаемого в выражениях (4.1) стремится к бесконечности (как говорят, двигатель идет «вразнос»), т. е. режим холостого хода для ДПТ ПВ является недопустимым.

Рис. 4.2 Рис. 4.3
При возрастании тока якоря магнитный поток Ф вначале растет примерно пропорционально току якоря, а скорость резко снижается (крутопадающий участок на характеристиках).
При больших токах двигатель работает в зоне, близкой к насыщению, поэтому его магнитный поток здесь мало меняется при изменении тока и характеристика становится более жесткой, приближаясь по виду к характеристике ДПТ НВ.
На практике для расчетов используют так называемые универсальные характеристики ДПТ ПВ, которые приводятся в каталогах.
4.2 Способы регулирования угловой скорости ДПТ ПВ
Для ДПТ ПВ, как и для ДПТ НВ, возможны три основных способа регулирования скорости: 1) введением добавочных сопротивлений в цепь якоря; 2) изменением подводимого напряжения; 3) изменением потока возбуждения.
Регулирование угловой скорости введением добавочных сопротивлений является простейшим способом регулирования и широко используется в подъемных и транспортных механизмах. Как следует из уравнений (4.1), при увеличении добавочного сопротивления R д второе слагаемое в этих выражениях увеличивается, т.е. увеличивается падение скорости от нагрузки. Соответственно электромеханическая и механическая характеристики в области больших токов становятся более крутопадающими (кривые 2 на рис. 4.2, рис. 4.3 - характеристики с R д ). Введение добавочных сопротивлений в цепь якоря ДПТ ПВ позволяет, как и для ДПТ НВ, регулировать скорость в относительно небольшом диапазоне и ограничить ток якоря при пуске. Обычно величину добавочных сопротивлений изменяют ступенями с помощью релейно-контакторной аппаратуры, как изложено в п. 2.2.
Основные недостатки такого регулирования – значительные потери энергии в добавочном сопротивлении, небольшой диапазон регулирования, ступенчатость регулирования.
Регулирование угловой скорости изменением подводимого напряжения может быть осуществлено так же, как для ДПТ НВ, с помощью отдельного генератора или тиристорного преобразователя. Регулирование ведется уменьшением подводимого напряжения и приводит, как следует из уравнений (4.1), к снижению скорости. В транспортных механизмах часто два тяговых двигателя одинаковой мощности работают как многодвигательный электропривод (например двухосный тяговый электропривод). При этом появляется дополнительная возможность ступенчатого изменения подводимого к двигателю напряжения за счет переключения двигателей с последовательного включения на параллельное. При последовательном включении на каждый двигатель приходится половина напряжения сети. Когда двигатели подключаются параллельно, каждый из них оказывается включенным на полное напряжение сети. Такое регулирование позволяет исключить нерациональную трату энергии.
Регулирование угловой скорости ослаблением потока возбуждения позволяет, как и для ДПТ НВ, получить скорости выше основной. Действительно, как следует из уравнений (4.1), уменьшение потока Φ приводит при том же токе якоря к возрастанию первого слагаемого. Ослабление потока возбуждения обычно осуществляют за счет шунтирования обмотки возбуждения добавочным сопротивлением.
Из анализа механических характеристик ДПТ ПВ следует, что они являются весьма удобными для электрической тяги (трамвай, метро, троллейбус, электровозы, тепловозы) и подъемных механизмов по следующим соображениям:
1) двигатель имеет низкую скорость при больших нагрузках и высокую - при малых, тем самым обеспечивается естественное регулирование скорости движения при изменении сопротивления перемещению;
2) транспортные и грузоподъемные механизмы требуют больших начальных моментов при пуске, именно такие моменты обеспечивает ДПТ ПВ; у ДПТ НВ момент пропорционален току - М ~I , а у двигателей последовательного возбуждения М ~I 2 . А так как при пуске двигателя I = (1,5…2,0)I н, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с ДПТ НВ;
3) момент ДПТ ПВ не зависит от напряжения питающей сети, что особенно важно для электрической тяги, где в контактной сети могут возникать большие отклонения напряжения.
Основным недостатком характеристик ДПТ ПВ является неограниченное возрастание скорости при малых токах якоря и, как следствие, невозможность обеспечить режим генераторного торможения.
4.3 Тормозные режимы ДПТ ПВ
Для ДПТ ПВ возможны два тормозных режима: торможение противовключением и динамическое торможение.
При торможении противовключением в цепь якоря вводится добавочное сопротивление для ограничения тока якоря. Механические характеристики при этом являются продолжением характеристик двигательного режима в области отрицательной угловой скорости (см. рис. 4.2, рис. 4.3). Такой режим торможения, как и для ДПТ НВ, может возникать, когда момент на валу двигателя превышает значение М 1 (рис. 4.3).
Динамическое торможение ДПТ ПВ может осуществляться двумя способами: с самовозбуждением и с независимым возбуждением. При использовании первого способа якорь и обмотка возбуждения отключаются от сети и замыкаются на добавочное сопротивление (рис. 4.4). При этом обмотку возбуждения или якорь переключают так, чтобы направление тока в обмотке возбуждения не изменилось. Если этого не сделать, то произойдет размагничивание машины.
При использовании второго способа - динамического торможения с независимым возбуждением - обмотку якоря замыкают на добавочное сопротивление, а на обмотку возбуждения подают напряжение от источника. Схема включения при этом аналогична схеме динамического торможения ДПТ НВ (рис. 2.14), аналогичны и получаемые тормозные характеристики.
Оба рассмотренных тормозных режима ДПТ ПВ малоэкономичны, так как энергия теряется на добавочных сопротивлениях.
В транспортных средствах очень важно обеспечить отдачу (рекуперацию) электроэнергии в сеть, например при движении на спуске. Однако, как уже отмечалось, генераторное торможение ДПТ ПВ невозможно. Чтобы решить эту проблему, в электротяге используют переключение обмотки возбуждения ДПТ с последовательного на независимое. Для этого отключают обмотку возбуждения от якоря и подают на нее через добавочное сопротивление напряжение сети. В результате машина работает с независимым возбуждением. Генераторное торможение такой машины рассмотрено в пп. 2.5, 3.5.
4.4 Механические характеристики и регулирование скорости ДТП смешанного возбуждения (СВ)
Схема подключения ДТП СВ приведена на рис. 4.5. Машина имеет две обмотки возбуждения: последовательную ОВМ1 и независимую ОВМ2.

Уравнения для электромеханической и механической характеристик двигателя аналогичны соответствующим уравнениям для ДТП ПВ:
ω д
= ![]() ; ω д
=
; ω д
= ![]() . (4.2)
. (4.2)
Причем здесь магнитный поток определяется как сумма магнитных потоков Φ 1 – обмотки ОВМ1 и Φ 2 – ОВМ2:
Φ = Φ 1 + Φ 2 .
Для ДТП СВ, в отличие от ДПТ ПВ, скорость идеального холостого хода имеет конечное значение и определяется потоком Φ 2 :
ω 0 = .
Механическая характеристика двигателя смешанного возбуждения (кривая 3 на рис. 4.6) занимает промежуточное положение между характеристикой ДПТ НВ – кривая 1 и характеристикой ДПТ ПВ – кривая 2. Скорость ДПТ СВ при малых нагрузках изменяется значительно. А при больших нагрузках характеристика достаточно жесткая и близка к линейной, как у ДПТ НВ (см. соответствующие пояснения в п.2.4.1).

Для ДПТ СВ возможны те же тормозные режимы, что и для ДПТ НВ: 1) генераторное; 2) динамическое; 3) противовключением.
Генераторное торможение соответствует участку характеристики при скорости больше ω 0. При переходе в режим генераторного торможения ток в якоре и в обмотке последовательного возбуждения меняет свой знак, что может размагнитить машину. Поэтому при возрастании скорости до ω 0 ОВМ1 обычно шунтируют, и машина работает как ДПТ НВ.
Для динамического торможения якорь двигателя замыкают на добавочное сопротивление, а ОВМ1 отключают, чтобы избежать размагничивания. В результате машина работает как ДПТ НВ и имеет такие же тормозные характеристики.
При торможении противовключением в цепь якоря вводят добавочное сопротивление, ограничивающее ток якоря. Характеристика при этом становится более мягкой (кривая 4 на рис. 4.6). Машина переходит в режим противовключения при отрицательных значениях скорости.
Регулирование скорости ДПТ СВ так же, как ДПТ ПВ, может осуществляться: 1) изменением подводимого напряжения; 2) введением добавочного сопротивления в цепь якоря; 3) изменением потока последовательной обмотки возбуждения. Кроме того, для ДПТ СВ появляется дополнительная возможность регулирования скорости изменением потока независимой обмотки возбуждения.
Из рассмотренного следует, что ДПТ СВ имеют характеристики, весьма удобные для тягового электропривода. По сравнению с ДПТ ПВ машины со смешанным возбуждением позволяют обеспечить генераторное торможение и регулирование скорости потоком обмотки независимого возбуждения.
ЗАКЛЮЧЕНИЕ
В настоящее время в промышленности и на транспорте в качестве регулируемого электропривода получил широкое применение электропривод постоянного тока, основные сведения о котором рассмотрены в учебном пособии.
Рассмотренные вопросы, конечно же, не исчерпывают всего многообразия применяемых и перспективных электромеханических преобразователей и электроприводов.
В 50-е годы прошлого столетия большие надежды возлагались на частотно-регулируемый электропривод с асинхронным двигателем с короткозамкнутым ротором.
Асинхронный двигатель по своим эксплуатационным свойствам, массогабаритным показателям значительно превосходит двигатель постоянного тока и имеет более низкую стоимость. Однако необходимость выпрямителей и достаточно сложных преобразователей частоты в значительной мере ослабляет эффект снижения стоимости и массогабаритных показателей регулируемого электропривода с асинхронным двигателем.
Поэтому регулируемый электропривод с машиной постоянного тока и в настоящее время во многих областях техники является конкурентоспособным с частотно-регулируемым электроприводом. Подтверждением этому может служить и тот факт, что с 60-х годов промышленно развитые страны каждые 5-7 лет в 2 раза увеличивают выпуск машин постоянного тока.
Известные достоинства коллекторных машин постоянного тока: высокая плотность энергии и отличные регулировочные характеристики, по-видимому, гарантируют их широкое использование в обозримом будущем.
К атегория:
Электрооборудование строительных машин
Механические характеристики электродвигателей постоянного тока
1. Электродвигатели с параллельным возбуждением
На рис. 7 приведена схема включения двигателя параллельного возбуждения.
Скорость вращения двигателя может быть выражена через ток в цепи яко,ря или через электромагнитный момент на валу двигателя.

Рис. 7. Схема включения двигателя постоянного тока параллельного возбуждения
Для построения механической характеристики двигателя параллельного возбуждения достаточно иметь две ее точки, так как характеристика имеет вид прямой линии (прямолинейна).
На рис. 8 приведены естественные и искусственные механические характеристики двигателя постоянного тока параллельного возбуждения.

Рис. 8. Механические характеристики двигателя постоянного тока с параллельным возбуждением
1 - естественная; 2 - искусственные при различных потоках возбуждения; 3 - искусственные при различных напряжениях; 4 - искусственные при различных сопротивлениях в цепи якоря
Искусственные механические характеристики, получаемые за счет изменения магнитного потока Ф или подводимого напряжения U (рис. 8, прямые 2 и 3), являются жесткими характеристиками, а получаемые за счет изменения сопротивления якорной цепи R - мягкими характеристиками (рис. 8, прямая 4).
Реверсирование вращения двигателя постоянного тока осуществляется изменением направления тока либо в обмотке якоря, либо в обмотке возбуждения. Переключение обмотки возбуждения практикуется реже, так как вследствие ее индуктивности время торможения возрастает по сравнению с переключением обмотки якоря.
Скоростные и механические характеристики, соответствующие условиям задачи, представлены на рис. 9.
Рис. 9. Естественная и искусственные скоростные (а) и механические (б) характеристики двигателя параллельного -возбуждения (к примеру 2)
В современных электроприводах часто возникает необходимость останавливать производственный механизм или изменять направление его движения. Эти операции можно осуществлять переводом электродвигателя в тормозной режим работы по одной из механических характеристик, отвечающих выбранному способу электрического торможения. Механические характеристики двигателя с параллельным возбуждением для различных режимов работы представлены на рис. 10.

Рис. 10. Механические характеристики двигателя с параллельным возбужденней при различных режимах работы
В этом режиме ток и момент на валу двигателя отрицательны. Рассматриваемый тормйзной режим работы электродвигателя создается автоматически, без каких-либо переключений в нормальной схеме, если ток возбуждения увеличивается или скорость вращения двигателя повышается сверх возможной скорости п0. В этом случае электрическая машина работает как генератор, отдавая электрическую энергию в сеть. Развиваемый машиной тормозной момент уравновешивается движущим моментом, приложенным к валу. Этот способ торможения применяется в крановых и других установках при спуске груза. Генераторное торможение в электроприводах с частыми пусками и остановками является весьма экономичным, поскольку оно сопровождается отдачей электроэнергии в сеть.
Генераторное торможение с отдачей энергии в сеть.
Механические характеристики машины в режиме генераторного торможения с отдачей энергии в сеть являются естественным продолжением характеристик двигательного режима в область квадранта II (см. рис. 10).
Генераторное торможение при замыкании якоря машины на сопротивление (динамическое торможение).
Механические характеристики машины в рассматриваемом режиме проходят через начало координат, располагаясь в квадранте II (см. рис. 10), так как при положительном значении скорости вращения ток и момент отрицательны по знаку. Жесткость характеристик уменьшается с увеличением сопротивления якорной цепи. В режиме динамического торможения машина работает генератором за счет кинетической энергии, накопленной во вращающихся инерционных массах электропривода и производственного механизма.
Схема включения двигателя, позволяющая перевести его в режим динамического торможения, приведена на рис. 11. Для осуществления торможения якорь двигателя необходимо отключить от сети контактором К и замкнуть его на сопротивление Rn контактором КТ. Обмотка возбуждения при этом остается включенной в сет‘ь так же, как и в двигательном режиме. Якорь двигателя, как уже указывалось, будет продолжать вращаться за счет кинетической энергии, запасенной в движущихся частях привода. Возникающая при этом э. д. с. ея вызовет ток в цепи якоря. Направление э. д. с. сохранится то же, что и в двигательном режиме, а ток и момент двигателя изменят свое направление. Двигатель будет развивать тормозной момент, направленный против движения. Под его воздействием произойдет быстрая остановка двигателя и связанных с ним вращающихся частей механизма.
Торможение прогивовключением. Механические характеристики двигателя в рассматриваемом режиме являются продолжением в квадрант IV механических характеристик двигательного режима (см. рис. 10).
Режим противовключения имеет место, когда момент на валу от груза (в подъемных механизмах) оказывается больше предельного момента, который может развивать электродвигатель в двигательном ‘режиме. В этом случае груз под действием своего веса начнет опускаться, что приведет к вращению электродвигателя в сторону’, противоположную той, которая определяется полярностью приложенного напряжения при данном включении обмоток. Направление тока при этом остается неизменным, т. е. таким же, что и в двигательном режиме; момент двигателя также сохраняет свой знак, но по отношению к новому установившемуся движению он будет являться тормозным.
Рис. 11. Схема включения двигателя при динамическом торможении
Величина тока в режиме противовключения больше, чем в двигательном режиме, поэтому и величина момента, развиваемая двигателем при торможении противо-включением, также увеличивается.
Режим противовключения часто используется в электроприводах для быстрого изменения направления их вращения-реверсирования.
Тормозной режим работы двигателя противовключе-нием может быть использован и для быстрой остановки производственного механизма. Для этого надо изменить полярность напряжения на зажимах обмотки якоря. Схема включения двигателя при торможении противовключением представлена на рис. 12. До перехода в режим противовключения якорь двигателя подключен к сети контактором КВ. Для осуществления торможения якорь двигателя отключается от сети этим контактором и снова включается в сеть контактором КН. При этом изменяется полярность напряжения на обмотке якоря и направление тока в нем. Двигатель создает тормозной момент и начинает останавливаться. Ограничение тока якоря в тормозном режиме производится путем включения добавочного сопротивления RB в цепь якоря. Переключение двигателя с помощью контакторов происходит автоматически, и скорость вращения двигателя за время переключения практически не изменяется.

Рис. 12. Схема включения двигателя при торможении противовключением
Следует иметь в виду, что если якорь двигателя не будет отключен от сети при скорости, близкой к нулю, то в соответствии со схемой включения двигателя начнется разбег его в обратном направлении.
При торможении противовключением двигатель Не только преобразует кинетическую энергию, запасенную в движущихся частях, в электрическую, но и потребляет энергию из сети. Энергия затрачивается (теряется) на нагрев сопротивлений в цепи якоря.
Из последнего равенства следует, что между моментом электродвигателя с последовательным возбуждением и его скоростью в области небольших нагрузок (ненасыщенная магнитная цепь) существует гиперболическая зависимость.
Механические характеристики электродвигателя с последовательным возбуждением при различных режимах работы приведены на рис. 14.
2. Электродвигатели с последовательным возбуждением
На рис. 13 приведена схема включения двигателя последовательного возбуждения.
Уравнение скоростной характеристики электродвигателя с последовательным возбуждением то же, что и для электродвигателя с параллельным возбуждением.
Поскольку магнитный поток пропорционален величине тока, можно, подставляя в формулу значение из равенства, получить путем преобразований выражение механической характеристики для двигателя с последовательным возбуждением:
Рис. 13. Схема включения двигателя постоянного тока последовательного возбуждения
Рис. 14. Механические характеристики двигателя с последовательным возбуждением при различных режимах работы
Анализ характера механической характеристики электродвигателя с последовательным возбуждением позволяет сделать следующие выводы:
а) при нагрузках ниже 20-25% номинальной работа электродвигателя на естественной характеристике практически недопустима из-за чрезмерного увеличения скорости вращения якоря (рис. 14, кривая 1);
б) с увеличением дополнительного сопротивления в цепи якоря жесткость механической характеристики уменьшается и она смещается вниз (рис. 14, кривая 2);
в) кривая механической характеристики асимптотически, как это следует из рис. 14, приближается к оси ординат, не пересекаясь с ней, из чего следует, что повышением скорости вращения нельзя перевести электродвигатель с последовательным возбуждением в генераторный режим работы с отдачей энергии в сеть (как это возможно у машины с параллельным возбуждением).
Для торможения машины с последовательным возбуждением обычно применяют противовключение или динамическое торможение.
При торможении противовключением механические характеристики являются продолжением характеристик двигательного режима в область отрицательной скорости. При этом в цепь двигателя вводится дополнительное сопротивление для ограничения тока. Двигатель с последовательным возбуждением работает в режиме противовключения при перемене полярности якоря. В обмотке возбуждения направление тока должно оставаться неизменным.
При динамическом торможении механические характеристики двигателя расположены в квадранте II. Тормозной момент в режиме динамического торможения при самовозбуждении уменьшается со снижением скорости машины.
Более эффективным является динамическое торможение с независимым возбуждением. В этом случае обмотка якоря отключается от сети и замыкается на внешнее сопротивление, а обмотка возбуждения подсоединяется к сети через дополнительное сопротивление. Поскольку в последнем случае двигатель работает генератором с независимым возбуждением, его характеристики подобны характеристикам двигателя с параллельным возбуждением при динамическом торможении. Эти характеристики прямолинейны и все пересекаются в начале координат, обладая большей жесткостью при меньших сопротивлениях.
Рис. 15. Схема включения двигателя в режиме динамического торможения при независимом питании обмотки возбуждения от сети
На рис. 15 приведена схема включения двигателя в режиме динамического торможения при независимом питании обмотки возбуждения от сети,
Двигатели постоянного тока, как обладающие большим пусковым моментом и выдерживающие значительные кратковременные перегрузки, нашли широкое применение в электроприводе крупных экскаваторов. К недостаткам применения двигателей постоянного тока относится необходимость установки преобразователей переменного тока в постоянный для питания этих двигателей.
К атегория: - Электрооборудование строительных машин
В зависимости от способа возбуждения различают ДПТ с независимым (или параллельным) возбуждением, с последовательным возбуждением и со смешанным возбуждением. Разновидностью независимого возбуждения является возбуждение от постоянных магнитов. Характерной особенностью таких двигателей является независимость тока возбуждения (и потока возбуждения) от тока якоря машины.
Рис. 65. ДПТ с независимым возбуждением, а) параллельным, б) от постоянных магнитов
Подставим в основное уравнение ДПТ в двигательном режиме работы выражения для тока якоря и ЭДС.
![]() ,
, ![]() и .
и .
В результате получим:
![]() .
.
Разрешив последнее уравнение относительно w, получим уравнение механической характеристики ДПТ с независимым возбуждением. С е = С м.
![]() .
.
Так как в этом случае Ф=const, то обозначим к = СФ и получим:
![]() .
.
Здесь w xx скорость идеального холостого хода машины; а Dw - изменение скорости, обусловленное моментом нагрузки двигателя. Сама механическая характеристика ДПТ с независимым возбуждением приведена на рис.66 и представляет собой прямую линию, наклон которой к оси абсцисс зависит от величины потока возбуждения и сопротивления якоря Rя . Чем меньше величина потока возбуждения и чем больше сопротивление Rя , тем круче механическая характеристика.
Порядок построения механическая характеристика ДПТ с независимым возбуждением по паспортным данным двигателя.
Вычисляем значение k
из соотношений ,
![]() и получим:
и получим: 

Рис. 66. Механическая характеристика ДПТ с независимым возбуждением
Вычислим w xx скорость холостого хода (точка 1). .
Определим положение рабочей точки 2: для этого возьмем
паспортное значение w ном и
вычислим значение момента:  .
.
Проведем прямую линию через две точки; она пересечет ось моментов в точке пускового момента. М=М п.
Как следует из уравнения механической характеристики, скорость двигателя при постоянном моменте нагрузки можно регулировать тремя способами:
- Изменением напряжения на якоре двигателя,
- Изменением сопротивления в цепи якоря двигателя,
- Изменением потока возбуждения машины.
При регулировании скорости первым способом, напряжение на якоре изменяется либо с помощью реостата, либо с помощью усилительно – преобразовательного устройства, при этом поток возбуждения остаётся постоянным. Семейство механических и регулировочных характеристик, соответствующих данному способу регулирования, приведено на рис.67.

Рис. 67. Семейство механических (а) и регулировочных (б) характеристик ДПТ с независимым возбуждением
С изменением напряжения U пропорционально изменяется и скорость холостого хода при этом угол наклона (или жестокость) механических характеристик остаётся неизменной. Регулировочные характеристики линейны при напряжении на якоре U > U тр; у них есть имеет зона нечувствительности при напряжении на якоре U < U тр, где U тр – напряжение трогания двигателя. Двигатель не будет вращаться до тех пор, пока М<М н , а для создания такого момента необходимо иметь при скорости вращения w= 0 ток якоря I тр и соответствующее напряжение U тр. .
Несмотря на то, что рассмотренный способ регулирования требует довольно сложного оборудования, его широко применяют в современных электроприводах, т.к. он обеспечивает плавное и экономичное регулирование скорости в широких пределах при сохранении высокой жесткости механических характеристик. Лучшие современные системы при данном способе обеспечивают диапазон до 1:100000.

