Для определения оптимальных параметров настройки регуляторов (параметрической оптимизации) АСР необходимо иметь сведения о статических и динамических характеристиках объекта регулирования и действующих возмущений. Наиболее достоверными являются экспериментально определенные статические характеристики.
Оптимальная настройка ПИД-регулятора позволяет максимально быстро и почти без перерегулирования вывести объект на уставку. Признак правильной настройки – плавный, без рывков, рост регулируемого параметра и наличие тормозящих импульсов при подходе к уставке как снизу, так и сверху (рис. 14.39).
Если объект выходит на уставку с небольшим перерегулированием и быстрозатухающими колебаниями, можно немного уменьшить коэффициент усиления, оставив все остальные параметры без изменения.
Величина максимума амплитудно-частотной характеристики замкнутой системы регулирования, а также ее резонансная частота могут быть определены из временной характеристики системы относительно управляющего воздействия по условной величине ее степени затухания и частоте(рис. 14.40).
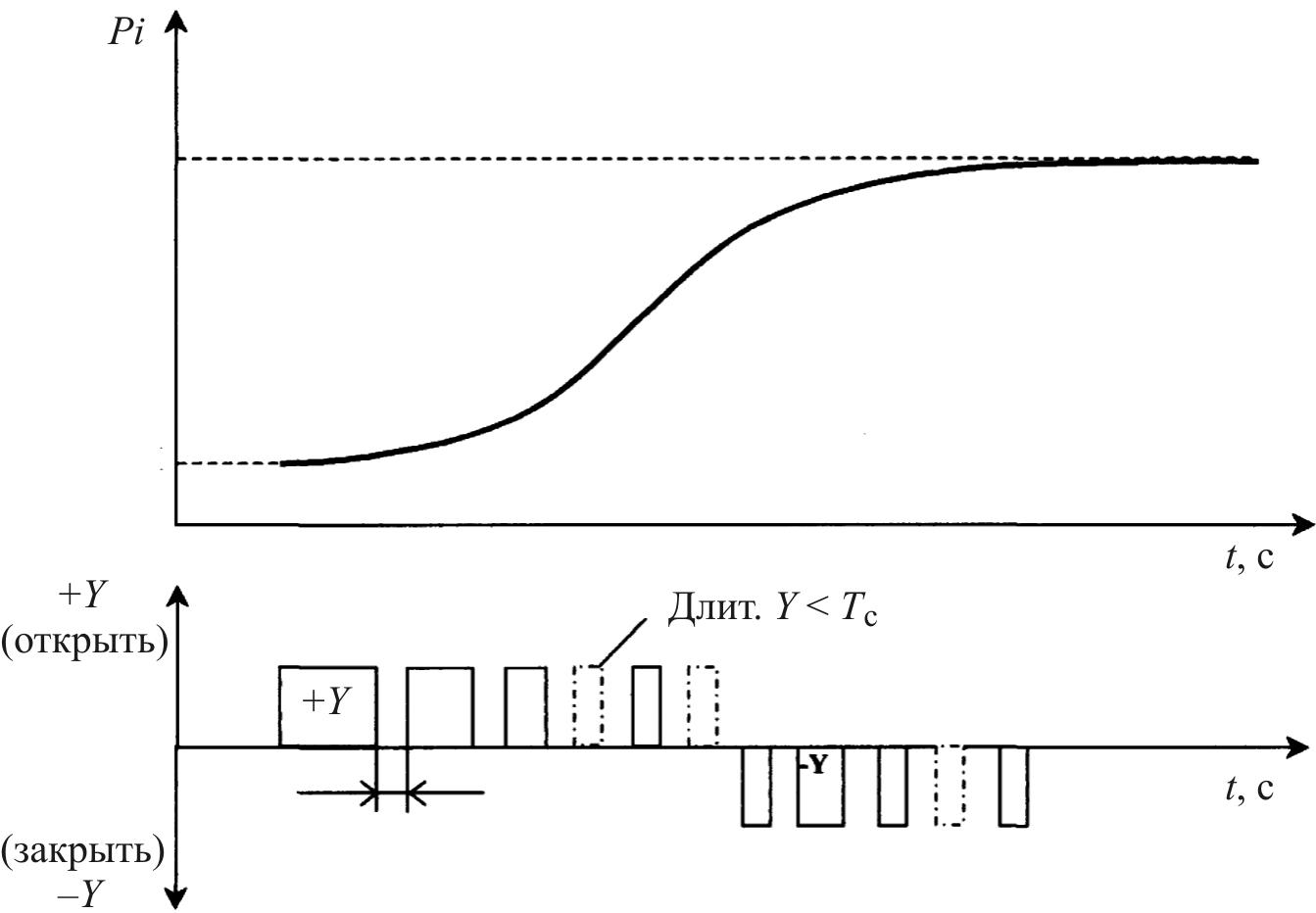
Рис. 14.39. Оптимальная работа ПИД-регулятора

Рис. 14.40. Переходная характеристика замкнутой системы регулирования
Указанное обстоятельство позволяет приближенно определить параметры регулируемого объекта ипо полученной экспериментально кривой переходного процесса при ступенчатом воздействии со стороны задатчика регулятора. Действительно, если известны степень затухания переходного процесса и его частота, а также числовые значения параметров настройки регулятора, при которых регистрировался этот процесс, то принципиально не представляет труда определить, каковы должны быть числовые значения параметров объектаидля того, чтобы амплитудно-фазовая характеристика разомкнутой системы с известными параметрами настройки регулятора касалась окружности с индексом, соответствующим этой степени затухания при частоте, соответствующей частоте переходного процесса.
Порядок определения оптимальной настройки ПИ-регулятора по графику временной характеристики замкнутой системы регулирования с помощью графиков заключается в следующем:
1. Система регулирования при произвольной настройке регулятора включается в работу. Убедившись, чтоона работает устойчиво, быстро изменяют задание регулятору на некоторую достаточно большую, но допустимую по условиям эксплуатации величину и регистрируют процесс изменения регулируемой величины во времени.
2. Из полученного графика изменения регулируемой величины, типовой вид которого приведен на рис. 14.40, определяются степень затухания и период колебаний переходного процессаТ.
3. Вычислив величину отношения периода колебаний переходного процесса к установленному в регуляторе во время проведения эксперимента значению времени изодрома, находят величины поправочных множителей на величину коэффициента передачи регулятора и на величину его времени изодрома, т.е. определяют, во сколько раз следует изменить числовые значения параметров настройки регулятора, чтобы настройка оказалась близкой к оптимальной.
4. Установив найденные параметры настройки в регуляторе, опыт повторяют и производят повторный расчет, аналогичный изложенному выше. Если окажется, что числовые значения поправочных коэффициентов близки к единице (находятся в пределах 0,95–1,05), можно считать, что настройка окончена. В противном случае необходимо произвести повторную перенастройку.
В практике наладочных работ используют приближенные формулы для определения оптимальных параметров настройки регуляторов для объектов, описываемых нижеприведенными выражениями при различных критериях оптимальности.
1. Всесоюзным теплотехническим институтом имени Ф.Э. Дзержинского (ВТИ) рекомендуются для степени затухания за период = 0,75 и интегральной квадратичной оценки, близкой к минимуму, следующие формулы расчета для параметров ПИ-регулятора с передаточной функцией:
W (P ) =K p (Т из Р + 1)/Т из Р .
При 0 < об /Т а < 0,2
, Т из = 3,3 об.
При 0,2 < об /Т а < 1,5
, Т из = 0,8Т а .
При = 0,9, 0 < об /Т а < 0,1
![]() ,
Т
из
= 5 об.
,
Т
из
= 5 об.
При 0,1 < об /Т а < 0,64
, Т из = 0,5Т а .
2. Имеются номограммы для подобных объектов, чтобы в зависимости от параметров объекта и заданного затухания определитьK р ,Т из (метод Ротача).
3. Существует метод компенсации большой постоянной времени объекта (Т из = Т об ) при коэффициенте демпфирования = 707 (модульный оптимум).
4. Аналитический расчет границы устойчивости и параметров регулятора при заданной степени колебательности по расширенным частотным характеристикам (метод Стефани) также применяется при наличии ЭВМ и соответствующих методик расчета. Все методики дают близкие результаты расчета параметров регулятора и, соответственно, близкие переходные процессы.
5. На практике расчеты регуляторов заканчиваются наладочными работами, когда используются экспериментальные методы параметрической оптимизации .
Эти методы основаны на прямом контроле переходных или частотных характеристик в процессе подбора оптимальных параметров настройки или с параметрами, заведомо обеспечивающими устойчивое движение АСР. Затем, вводя возмущение, наблюдают реакцию системы на эти возмущения. Целенаправленно изменяя параметры настройки регулятора, добиваются нужного характера переходного процесса. Это многошаговая итерационная процедура. Данные методы разработаны настолько, что позволяют автоматизировать этот процесс при минимальном участии человека 3 .
Самая простая настройка, когда в замкнутой АСР с ПИ-регулятором (при ПИ-регуляторе Т из устанавливают очень большим) увеличиваютK p до границы устойчивости, определяютK p .кр и Т пер.кр – период установившихся колебаний. Затем выставляют параметры:
Для П-регулятора K p .опт = 0,55 K p .кр;
Для ПИ-регулятора K p .опт = 0,55K p .кр,Т из = 1,25Т пер.кр.
6. Лучшие результаты дает пошаговая оптимизация с оценкой переходной характеристики на каждом шаге.
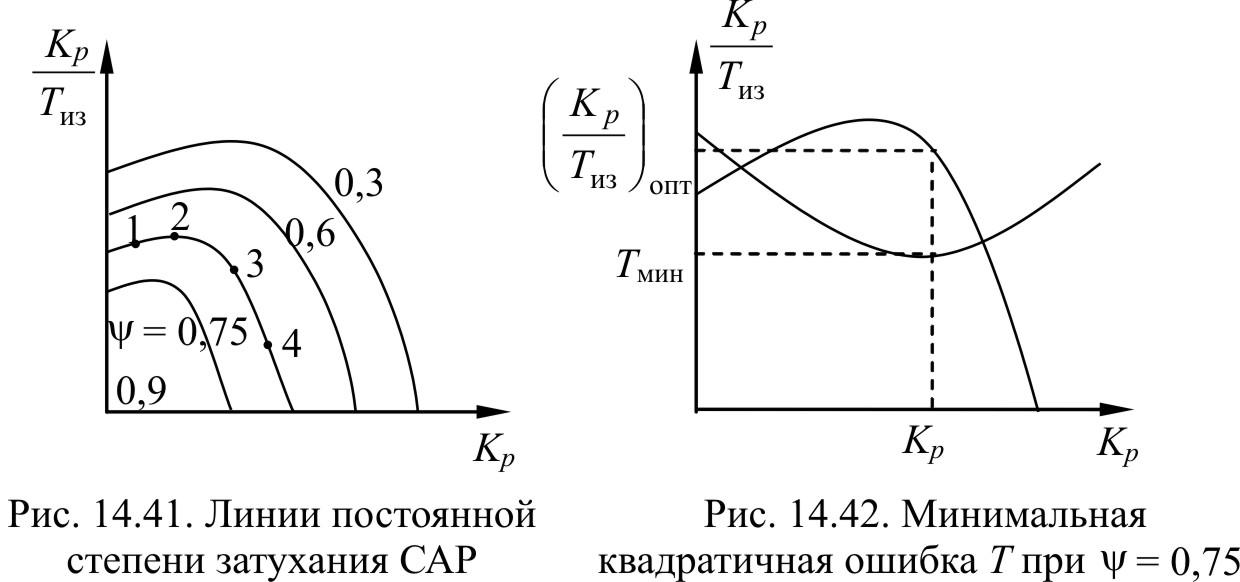
В плоскости параметров настройки ПИ-регулятора существуют линии одинаковой степени затухания (рис. 14.41).
Одно и то же затухание (пусть ψ= 0,75) можно получить при различных параметрах регулятора. Нужно обеспечить при этом минимальную квадратичную ошибку, которая изменяется в плоскости как показано на рис. 14.42. Таким образом, надо искать оптимальную точку настройки.
Из кривых (рис. 14.43) для различных настроек можно видеть, что в точках 1 и 2 переходные процессы затянуты, в точке 4 имеется апериодическая составляющая, затягивающая процесс. Поиск оптимальной настройки состоит из следующих этапов (рис. 14.44, 14.45):
1. ЗавышаютТ из, занижаютK р (точка 1).
2. Увеличивают K р , чтобы при колебательном процессе ψ = 0,8–0,9 (точка 2 ).
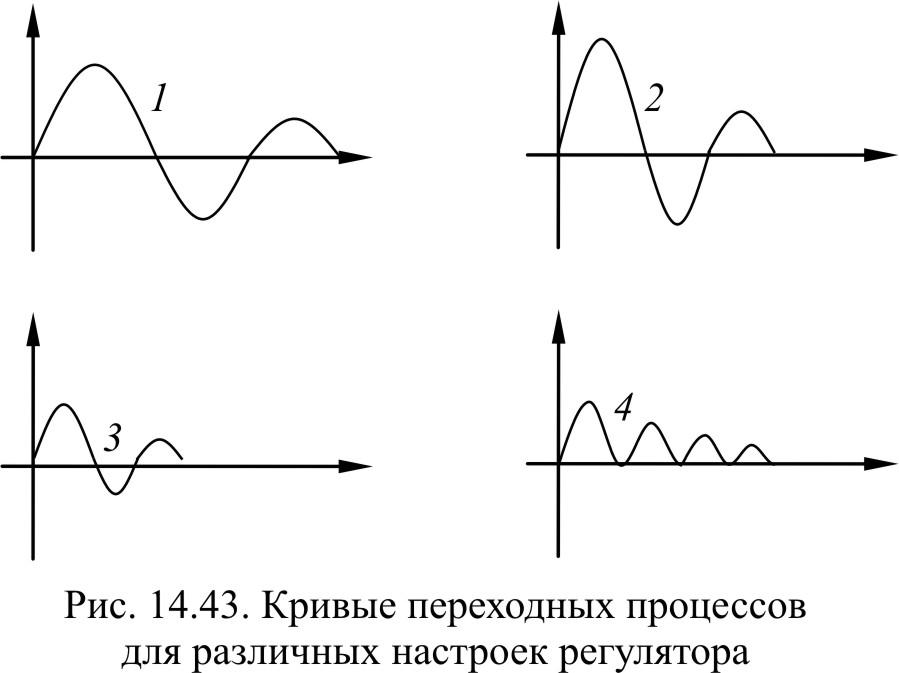
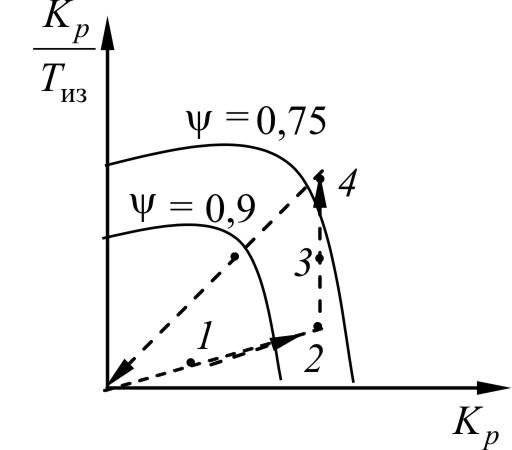
Рис. 14.44. Этапы практической настройки параметров ПИ-регулятора
3. УменьшаютТ из, чтобы избавиться от апериодической составляющей (точки3 ,4 ).
4. УменьшаютK р , чтобы приψ= 0,95…1 и при различных вариациях динамических свойств объекта регулирования переходные процессы были слабоколебательными (точка5 ).
Данный метод оптимизации не требует точного определения параметров объекта и параметров регулятора, так как варьирование параметров настройки производят относительно исходных значений, поэтому он широко применяется.

Рис. 14.45. Характер переходных процессов при различных настройках параметроврегуляторов
К примеру, в инструкции для наладчика САР с цифровым ПИ-регулятором даны следующие рекомендации.
регулятор настроен на ПИ-регулирование;
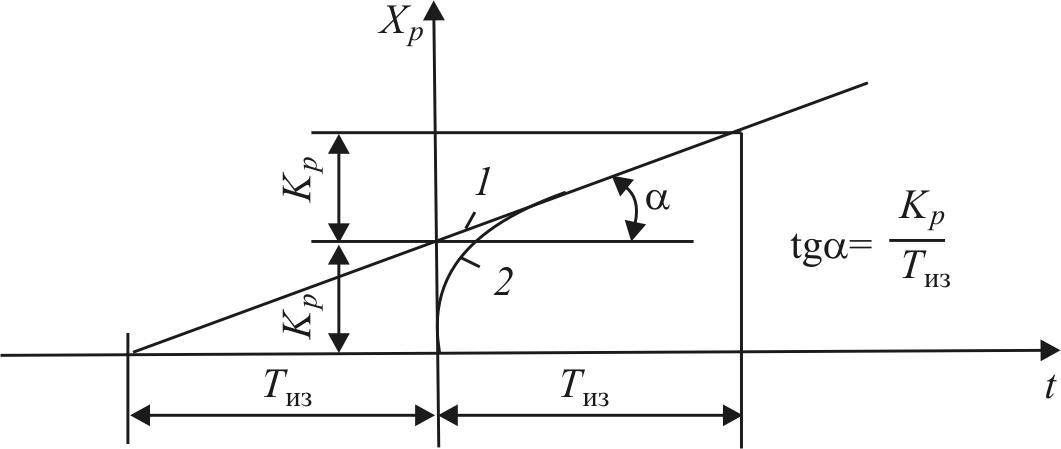
Рис. 14.46. Переходный процесс выходного сигнала ПИ-регулятора
структурная схема управления приведена на рис. 14.47;
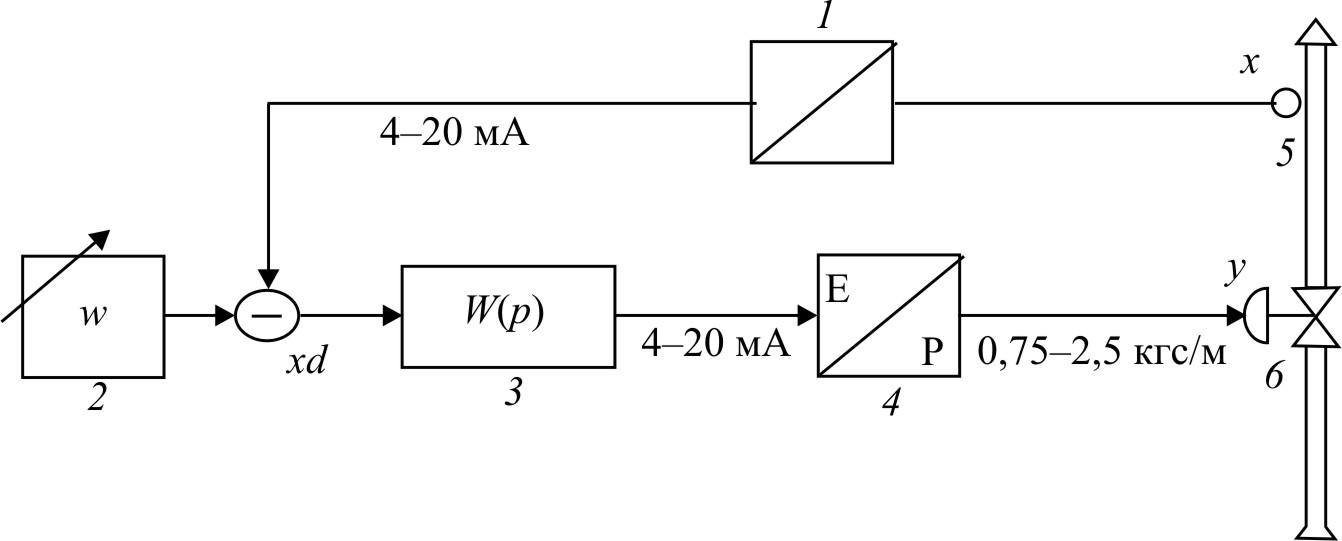
Рис. 14.47. Структурная схема управления объектом с пневматическим исполнительным механизмом:w – задающее воздействие;x – регулируемая величина;xd – отклонение регулируемой величины;y – управляющее воздействие;1 – измерительный преобразователь; 2 – задатчик величины; 3 – регулировочный усилитель; 4 – электропневматический преобразователь сигнала; 5 – датчик; 6 – пневматический исполнительный блок
– пропорциональный коэффициент K р = 0,1;
– время изодрома T n = 9984 с;
– время предварения T v =oFF ;
– настройка параметров ПИ-регулятора:
установить желаемую заданную величину и в ручном режиме установить рассогласование регулирования на ноль;
переключиться на автоматический режим;
медленно увеличивать K р , пока регулирующий контур через малые изменения заданной величины не начнет клониться к колебаниям;
незначительно уменьшать K р , пока колебания не будут устранены;
уменьшать T n до тех пор, пока регулирующий контур снова не начнет клониться к колебаниям;
медленно увеличивать T n до тех пор, пока уклон к колебаниям не будет устранен.
Билет №16
насосы - машины, подающие жидкости;
вентиляторы и компрессоры - машины, подающие воздух и технические газы.
Вентилятор - машина, перемещающая газовую среду при степени повышения давления Ер < 1,15 (степень повышения давления Ер - отношение давления газовой среды на выходе из машины к давлению ее на входе).
Компрессор - машина, сжимающая газ с Ер >1,15 и имеющая искусственное (обычно водяное) охлаждение полостей, в которых происходит сжатие газов.
Согласно ГОСТ 17398-72 нагнетатели (насосы) подразделяются на две основные группы: насосы динамические и объемные.
В динамических нагнетателях передача энергии жидкости или газу происходит путем работы массовых сил потока в полости, постоянно соединенной с входом и выходом нагнетателя.
В объемных нагнетателях повышение энергии рабочего тела (жидкости или газа) достигается силовым воздействием твердых тел, например поршней в поршневых машинах в рабочем пространстве цилиндра, периодически соединяемым при помощи клапанов с входом и выходом нагнетателя.
Для процессов системы требуется способность параметров к реагированию на внешнее действие и поддержание системных постоянных величин. Для примера, система насосов с клапанами отвода. Для каждого клапана поддержание потока в постоянном виде обеспечивает постоянное давление в трубах. Помпа в системе приводится в действие приводом, при открывании клапана скорость двигателя увеличивается и снижается при закрытии, чтобы поддерживать давление в трубах на одном уровне.
Для такого поддержания давления существует прибор, который называется регулятором задания. Давление в трубах на датчике идет в сравнение с параметром заданного давления. Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор.
Регулятор пропорционального типа.
Такой регулятор – главный, скорость задается в прямой зависимости от ошибки. При применении пропорционального регулятора система будет иметь ошибку. Малые значения коэффициента регулятора пропорционального типа дают вялость системы, а высокие параметры к колебаниям и нестабильности системы.
Регулятор интегрального типа.
Такой регулятор применяется для удаления ошибки. Скорость увеличится до удаления ошибки (снизится при негативной ошибке). Небольшие значения суммирующей составляющей слишком оказывают влияние на деятельность регулятора в общем. При установлении больших значений происходит промахивание системы, она функционирует с перерегулированием.

Регулятор дифференциального типа.
Такой регулятор измеряет скорость корректировки ошибки, применяет для повышения системного быстродействия, увеличивает регуляторное быстродействие в общем. Во время увеличения быстродействия регулятора повышается перерегулирование. Это обуславливает к системной нестабильности. Во многих случаях составляющая дифференциальная становится равной нулю или близкой к наименьшему значению для того, чтобы предотвратить это состояние. Она бывает полезной в позиционирующей системе.

Работа регулятора в обратном и прямом действии.
Множество регуляторов имеют принцип прямого действия. Повышение скорости двигателя приводит к повышению переменной величины процесса. Это случай в системе насосов, давление это величина переменная процесса. Повышение скорости двигателя обуславливает повышение давления. Во многих системах повышение скорости двигателя обуславливает к снижению параметра переменной процесса. Температура вещества, которое обдувается вентиляционной системой теплообменника – процессная переменная величина: при повышении скорости вентиляционной системы температура вещества снижается. В этом разе нужно применить регулятор действия обратного вида.
Настраивание ПИД-регулятора.
Для моторной управляемости системы настраивание ПИД-регулятора бывает сложным процессом. Расскажем, какие шаги для настройки могут сделать проще эту процедуру.
- 1. Определите значение дифференциальной и интегральной равной нулю. Определите наибольшую скорость и контролируйте системную реакцию.
- 2. Повышайте составляющую прямопропорционально и выполните первый пункт. Продолжайте действия до момента начала процесса с автоматическими колебаниями возле точки определения скорости.
- 3. Снижайте пропорциональную величину, пока система не стабилизируется. Волны колебаний начнут затухать.
- 4. Определите пропорциональную величину около 15% меньше этого постоянного пункта.
- 5. Определяйте наибольшую скорость прерывисто, повышайте суммирующую составляющую до начала уменьшения колебаний скорости перед стабильным состоянием системы. Снижайте суммирующую составляющую до достижения системой определенной скорости без ошибки и колебаний.
- 6. Во многих системах настраивание составляющей дифференциального вида не нужно. Если нужно быстродействие системы больше, то можно достигнуть этого путем настройки составляющей дифференциального вида. Устанавливайте скорость по интервалам, повышайте составляющую дифференциального вида, пока не стабилизируется система с наименьшим временем действия (повышайте медленно, избегая состояния нестабильности). Система станет оптимальной при одном перерегулировании.
- 7. Контролируйте стабильность системы, устанавливая значения скорости с интервалами и периодами для гарантированной стабильности системы при плохом исполнении задания.
Настраивание датчика на 20 миллиампер ПИД-регулированием.
1.Действия в программном меню.
Управляющая панель частотного преобразователя А300 состоит из 3-уровневой структуры:
- · Группы опциональных значений (1 уровень).
- · Опциональные значения (2 уровень).
- · Параметр опционального значения.

2.Настраивание характеристик электромотора и определение направления момента.
Установить метод в значении Р0-02:
- · Р0-02=0 (настройка завода, пульт преобразователя).
- · Р0-02=1 (входные команды внешнего управления D1-D7).
Установить характеристики номинального значения электромотора (применяйте параметры с таблички и паспорта электромотора):
- · Мощность номинала Р1-01= установите значения.
- · Напряжение номинала Р1-02= установите значения (по заводским настройкам 380 вольт).
- · Ток номинала Р1-03= установите значения.
- · Частота номинала Р1-04= установите значения (по заводским настройкам 50 герц).
- · Обороты номинального значения Р1-05= установите значения.
После подсоединения и введения параметров нужно проконтролировать направление вращающего момента электромотора. После отключения меню программы на экране покажется 50 герц, клавишей «вниз» установите наименьшую частоту для задания направления вращающего момента. Для пуска мотора нажмите клавишу «пуск» (параметр Р0-02=0), определите направление момента вращения, затормозите мотор, нажав клавишу «стоп». Если вращение не совпадает с направлением, то измените две любые фазы питания мотора (замену фаз производить при отключенном частотнике) или поменяйте параметр настройки Р0-09= (0-вперед, 1-назад). Еще раз проконтролируйте момент вращения, нажав клавишу «пуск», если направление момента вращения совпадает, то затормозите мотор, нажав клавишу «стоп». Нажмите клавишу «вверх» и возвратите настроенную частоту 50 герц.
3.Подсоединение датчика (выход на 20 миллиампер).
- · Установку производить при выключенном питании частотного преобразователя.
- · Напряжение датчика подсоединить к контакту «+24В», сигнал соединить с контактом «AI1», установить перемычку на контакты «COM» и «GND».

Переставить соединение «J1» в состояние «I».

4.Контроль обратной связи.
- · Подключите напряжение на частотный преобразователь, на экране возникнет подсветка 50 герц.
- · Нажмите клавишу «сдвиг» 2 раза.
- · На экране будет параметр обратной связи в интервале 0-10 (0-20 мА), зависит от настраиваемого параметра.
Связь обратного вида (4 мА).

- · После подтверждения обратной связи нажмите три раза клавишу «сдвиг», появится на экране 50 герц.
- · Установите наименьшее значение сигнала входа в величине Р4-13=2.00 (4 мА).
5.Как настраивать значение параметра ПИД-регулирования.
- · Установите источник основной частоты Р0-03=8 (частоту определяет ПИД-регулятор).
- · Поставьте значение ПИД-регулятора в значение РА-01= результат поддерживаемой величины в процентах (от 0 до 100%) от интервала датчика, РА-01= (результат поддерживаемого параметра/интервал датчика)*100%.
Пример установки значения:
Подсоединен датчик давления на 16 бар с сигналом выхода от 4 до 20 мА. Для давления в 10 бар нужно установить значение
РА-01=(10/16)*100%=62,5%
Произведите тестовый пуск. Проверяйте поддерживаемое значение параметра по приборам, дублирующим измерения (ротаметр, термометр, манометр). Если система регулировки функционирует нестабильно или долгий отклик на замену проверяемого параметра, то применяйте настройки значений РА-05, -06, -07. Эти значения предназначены для точной настройки ПИД-регулятора.
Пример использования регулирования ПИД.
Данные.
- · Механизм вентиляторного управления.
- · Характеристика градуировочная датчика давления, интервал 1000-5000 Па, ток 4-20 мА.
- · Значение давления 1500 Па.
- · Мощность механизма и инерционные данные вентилятора отсутствуют.
Наружные подключения.
Датчик обратной связи подсоединен к токовому входу аналогового типа, датчик значения уставки к входу аналогового типа напряжения.
Обратная связь.
Датчик связи определен по токовому выходу, входом связи обратного вида применяется токовый вход. Задается РR.10-00=02 (обратная связь с минусом по входу, повышение частоты выхода, повышает давление).
Отградуированная характеристика датчика.

Сигнал связи обратного вида в масштабе.
Вход связи обратного вида не создает масштаб по усилению и смещению. Применяя параметр PR10-01 можно изменять значение сигнала связи обратного вида в расчетах.
Применение параметра PR10-01 для корректировки значения сигнала связи обратного типа.
Значением PR10-01 можно корректировать значение сигнала связи обратного вида, который применяется в вычислениях. Интервал пропорциональности 0-10, по настройкам завода 1.
Сигнал связи обратного вида повышается в 2 раза перед установкой в ПИД-регулятор. Это равно снижению интервала входа в 2 раза.
Сигнал связи обратного вида снижается в 2 раза перед установкой в регулятор, это эквивалентно увеличению интервала входа в 2 раза. Сейчас интервал ограничен значением датчика.
Пример установки значения параметра PR10-01 (масштаб усиления обратной связи).
Интервал действия датчика:
1000Ра – 5000Ра.
Наибольшее давление функционирования: 2000Ра.
Применяемая часть интервала работы датчика (закрепленная): -1000Ра-2000Ра.
Это будет равно: 2000Ра –(-1000Ра)
5000Ра –(-1000Ра) = 50%
Если интервал действия не больше 2000Ра с датчиком, то величина параметра
PR10-01 = 1/50%=2
Формула вычисления параметра PR10-01.
Наибольший сигнал датчика: MaxVal
Наименьший сигнал датчика: MinVal
Наибольший нужный сигнал связи обратного вида MaxFBVal
Величина значения ПИД (установленная частота).
Установленную частоту можно изменять операторами наклона и перемещения опции преобразования.
Направление момента вращения установки вентилятора не изменяется, лучше применять AVI вход с заданием значения PR 02-00=01.
PR10-01 (наибольшая частота).
Задать в PR01-00 величину наибольшей частоты механизма вентиляции (PR01-00 = 50 герц).
Наименьшая частота.
Наименьшая частота не оказывает влияния на действие регулировки.
Наклон и перемещение опции преобразования.
Задать PR04-00 AVI перемещение интервала.
PR04-01 AVI полярность.
PR04-02 AVI корректировка наклона.
Вращение производится в одну сторону, PR04-03 = 0 (по заводским настройкам).
Величина уставки.
Для установки величины входа интервал частоты рассчитывается 0-100%.
Установка значения уставки.
При функционировании вентилятора давлению в 1500 Ра равен сигнал датчика 10,67 мА. Величине уставки 1500 Ра равна частота выхода 42%*50 герц = 21 герц и 84%*50 герц = 42 герц.
Можно устанавливать значение в Ра. Если 100% интервала равно 2000 Ра, то при коэффициенте 00-05 = 2000/Fmax = 2000/50 = 40, установленная величина 1500 и задается 1500 Ра.
Интервал частоты выхода.
Верхняя граница частоты выхода при регулировке определяется формулой:
Fmax=Pr01-00хPr10-07.
ПИД-регулирование.
Ускорение – замедление.
При взаимодействии с регулированием ПИД нужно время ускорения и замедления устанавливать минимальным для качественной регулировки.
Настраивание регулятора.
- · Задать величину I для легкого отклика, без перерегулировки.
- · Значение параметра для вентилятора не нужно, из-за замедления процесса.
- · Задать другие значения величин.
- · Повышение Р разгоняет процесс, снижает ошибки.
- · При большом Р появляется неустойчивость процесса.
- · Снижение величины I ускоряет процесс, делает нестабильным.
- · Быстрота дает снижение Р и I.
- · Замедление вентилятора определяет большего значения Р.
- · Задайте время ускорения и замедления наименьшим.
При прочих равных условиях пропорционально-интегрально-дифференциальные или ПИД (PID - Proportional-Integral-Derivative) регуляторы позволяют поднять точность управления в 5-100 раз по сравнению с позиционным регулятором.
Наиболее часто в задачах АСУ ТП применяются двухпозиционное регулирование и ПИД регулирование.
Двухпозиционное регулирование обеспечивает включение или отключение исполнительного устройства (например, нагревателя) в зависимости от того, ниже или выше измеренный параметр относительно заданного уровня. При двухпозиционном регулировании в системе всегда присутсвуют колебания технологического параметра, причем размах этих колебаний определяется только параметрами системы (инерционностью датчиков, исполнительного устройства и самой системы) и практически не зависит от регулятора.
При ПИД регулировании сигнал управления зависит от разницы между измеренным параметром и заданным значением, от интеграла, от разности и от скорости изменения параметров. В результате ПИД регулятор обеспечивает такое состояние исполнительного устройства (промежуточное между включен или выключен), при котором измеренный параметр равен заданному. Поскольку состояние исполнительного устройства стабилизируется, точность поддержания параметра в системе повышается в десятки раз. Таким образом, закон регулирования обеспечивает точность.
В принципе, точность поддержания будет определяться точностью измерения сигнала и интенсивностью внешних воздействий на объект.
Pb - начальная температура в системе
ti - постоянная времени интегрирования
td - постоянная времени дифференцирования
Сигнал управления для ПИД регулятора определяется тремя компонентами:
(П - пропорциональная компонента)
Сигнал управления, который вырабатывает регулятор, определяется тем, насколько велико рассогласование (пропорциональная компонента), насколько долго сохраняется рассогласование (интегральная компонента) и, наконец, как быстро изменяется рассогласование (дифференциальная компонента).
Качество управления, которое обеспечивает ПИД регулятор в значительной степени зависит от того, насколько хорошо выбранные параметры регулятора соответствуют свойствам системы. Это означает, что ПИД регулятор перед началом работы необходимо настроить.
Качество регулирования ПИД-регулятора определяется точностью настройки его параметров. Существует много различных методик настройки ПИД регуляторов. В основе большинства из них лежит анализ переходной характеристики.
Этап 1. Настройка пропорциональной компоненты ПИД-регулятора
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, либо постоянная интегрирования устанавливается максимально возможной, а постоянная дифференцирования- минимально возможной. Устанавливается необходимая уставка SP. Зона пропорциональности устанавливается равной 0 (минимально возможной). В этом случае регулятор выполняет функции двухпозиционного регулятора. Регистрируется переходная характеристика.
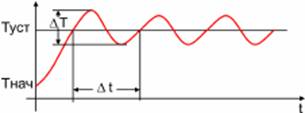
Тнач - начальная температура в системе
Туст - заданная температура (уставка)
Δ
Т- размах колебаний температуры
Δ
t - период колебаний температуры
Установить зону пропорциональности равной размаху колебаний температуры: Pb=Δ
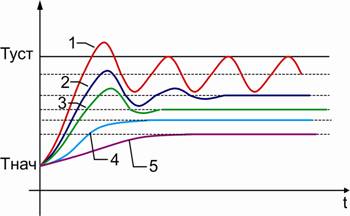
Т. Это значение служит первым приближением для зоны пропорциональности. Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис.2.
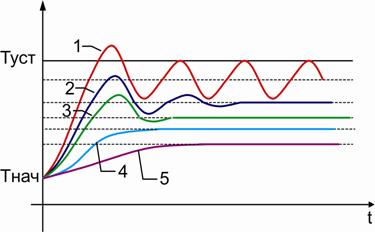
Переходная характеристика типа 1
Значение зоны пропорциональности по-прежнему очень мало, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Зону пропорциональности следует значительно увеличить.
В переходной характеристике наблюдаются затухающие колебания (5-6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
В переходной характеристике наблюдаются небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась .
Переходная характеристика типа 4
Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5
Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Этап 2. Настройка дифференциальной компоненты (td) ПИД-регулятора

Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует сразу перейти к этапу 3 (Настройка интегральной компоненты ti).
На этапе настройки зоны пропорциональности установлена зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис.1, кривая 2, рис.3, кривая 1.). Следует установить постоянную времени дифференцирования так, чтобы переходная характеристика имела вид кривой 2 на рис.2. В качестве первого приближения постоянная времени дифференцирования делается равной td = 0,2Δ t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис.1). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Этап 3. Настройка интегральной компоненты (ti) ПИД-регулятора
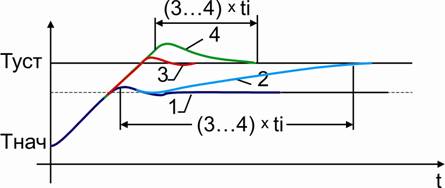
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на рис., кривая 1. Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины, равной Δ t.
Переходная характеристика типа 2
Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым и длится примерно (3…4)ti.
Переходная характеристика типа 4
Получается при слишком малой величине постоянной времени интегрирования. Выход на уставку также длится (3…4)ti. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3
Оптимальная.
Итог
Таким образом, мы рассмотрели процесс поэтапной настройки различных компонент ПИД-регулятора. На каждом этапе контролировался вид переходной характеристики и при необходимости корректировались значения параметров ПИД-регулятора. При этом начальными значениями параметров служили параметры переходной характеристики, полученной для двухпозиционного регулятора, а именно: Pb = ΔТ; ti= Δt; td = 0.2Δt. Опыт показывает, что для большинства случаев эти значения параметров обеспечивают настройку ПИД-регулятора, близкую к оптимальной, и дальнейшая коррекция параметров не требуется.
). Теперь, как и обещал, рассмотрим основные методы настройки и подбора его коэффициентов) Вообще, по большому счету, при использовании ПИД-регулятора необходимо построить модель всей системы в целом и математически вычислить необходимые значения коэффициентов. Так делать правильно. Но, естественно, так никто не делает 😉 На самом деле, математический расчет коэффициентов задача далеко не тривиальная, требует глубоких знаний теории автоматического управления, поэтому и используются другие, упрощенные, методы настройки.
Наиболее часто использующимся методом настройки коэффициентов является метод Циглера-Никольса. Заключается он в следующем…
Метод Циглера-Никольса.
Собственно, на этом практическая часть метода заканчивается) Из полученного коэффициента рассчитываем пропорциональный коэффициент ПИД-регулятора:
![]()
А из него получаем и остальные:
Метод довольно прост, но применить его можно далеко не всегда. Если честно, мне еще ни разу не приходилось настраивать регулятор таким образом 😉 Но тем не менее, этот метод является основным и, по большому счету, единственным широко известным. Просто подходит не всем и не всегда.
Что же делать, если метод Циглера-Никольса не сработал? Тут придет на помощь «аналитический» метод настройки =)
Опять же обнуляем все коэффициенты и начинаем увеличивать пропорциональный. Но теперь не ждем появления колебаний, а просто фиксируем поведение системы для каждого значения коэффициента (отличным вариантом будет построение графика величины, которую необходимо стабилизировать, для каждого значения коэффициента). Если видим, что, например, система очень медленно выходит на нужное значение, увеличиваем пропорциональный коэффициент. Система начинает сильно колебаться относительно нужной величины? Значит, коэффициент слишком велик, уменьшаем и переходим к настройке других составляющих.
Понимая, как работает ПИД-регулятор в целом, и представляя, как должна работать настраиваемая система, можно довольно-таки быстро и точно настроить коэффициенты регулятора. Особенно, если есть возможность построить графические зависимости и визуально следить за поведением системы.
Вот некоторые правила, которые могут помочь при настройке:
- Увеличение пропорционального коэффициента приводит к увеличению быстродействия, но снижение устойчивости системы
- Увеличение дифференциальной составляющей также приводит к значительному увеличению быстродействия
- Дифференциальная составляющая призвана устранить затухающие колебания, возникающие при использовании только пропорциональной составляющей
- Интегральная составляющая должна устранять остаточное рассогласование системы при настроенных пропорциональной и дифференциальной составляющих
Кстати, стоит добавить, что не всегда необходимо использовать все три составляющие ПИД-регулятора, порой хватает пропорциональной и дифференциальной, например (ПД-регулятор). В общем, все сводится к тому, что для каждой системы необходим свой собственный подход при настройке и использовании ПИД-регулятора.
На этом на сегодня все, возможно, как-нибудь рассмотрим практическую реализацию ПИД-регулятора 😉
В данной статье приведены основные принципы и правила настройки коэффициентов ПИД-регулятора сточки зрения практического применения. Теоретические основы можно прочитать .
Для простоты изложения рассмотрим настройку регулятора на примере. Допустим, необходимо поддерживать температуру в помещении с помощью обогревателя, управляемого регулятором. Для измерения текущей температуры используем термопару.
Задача настройки
Настройка регулятора производится с одной единственной целью: подобрать его коэффициенты для данной задачи таким образом, чтобы регулятор поддерживал величину физического параметра на заданном уровне. В нашем примере физическая величина — это температура.
Допустим текущая температура в помещении 10 °С, а мы хотим, чтобы было 25°С. Мы включаем регулятор и он начинает управлять мощностью обогревателя таким образом, чтобы температура достигла требуемого уровня. Посмотрим как это может выглядеть.
На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора. Физическая величина плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно. Оно зависит от многих параметров: размеров комнаты, мощности обогревателя и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
Чёрным цветом показан график изменения температуры в том случае, если коэффициенты подобраны совсем плохо. Система теряет устойчивость. Регулятор при этом идёт «в разнос» и температура «уходит» от заданного значения.
Рассмотрим более благоприятные случаи.
 На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
А вот и приемлемые кривые:
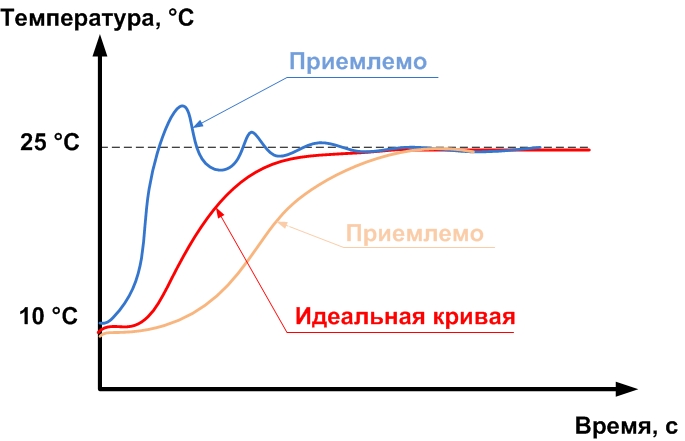 Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
В процессе настройки регулятора, пользователю необходимо стремиться получить кривую, близкую к идеальной. Однако, в реальных условиях сделать это не так-то просто — приходится долго и мучительно подбирать коэффициенты. Поэтому зачастую останавливаются на «приемлемой» кривой регулирования. Например, в нашем примере нас могли бы устроить коэффициенты регулятора, при которых заданная температура достигалась бы за 15-20 минут с максимальным перерегулированием (максимальными «скачками» температуры) 2 °С. А вот время достижение уставки более часа и максимальные «скачки» температуры 5 °С — нас бы не устроили.
Настраиваем пропорциональный коэффициент
Выставляем дифференциальный и интегральный коэффициенты в ноль, тем самым убирая соответствующие составляющие. Пропорциональный коэффициент выставляем в 1.
Далее нужно задать значение уставки температуры отличное от текущей и посмотреть, как регулятор будет менять мощность обогревателя, чтобы достичь заданного значения. Характер изменения можно отследить «визуально», если у вас получится мысленно представить этот график. Либо можно регистрировать в таблицу измеренное значение температуры каждые 5-10 секунд и по полученным значением построить график. Затем нужно проанализировать полученную зависимость в соответствии с рисунком:
 При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Настраиваем дифференциальный коэффициент
Постепенно увеличивая дифференциальную составляющую, необходимо добиться уменьшения или полного исчезновения «скачков» графика (перерегулирования) перед выходом на уставку. При этом кривая должна стать еще больше похожа на идеальную. Если слишком сильно завысить дифференциальный коэффициент, температура при выходе на уставку будет расти не плавно, а скачками (как показано на рисунке).

При появлении таких скачков необходимо прекратить увеличение дифференциального коэффициента.
Настраиваем интегральный коэффициент
При настройке двух предыдущих коэффициентов можно получить практически идеальную кривую регулирования или близкую к ней кривую, удовлетворяющую условиям задачи. Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении. Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю (). При этом мощность регулятора тоже станет равна 0 и он начнёт остывать.
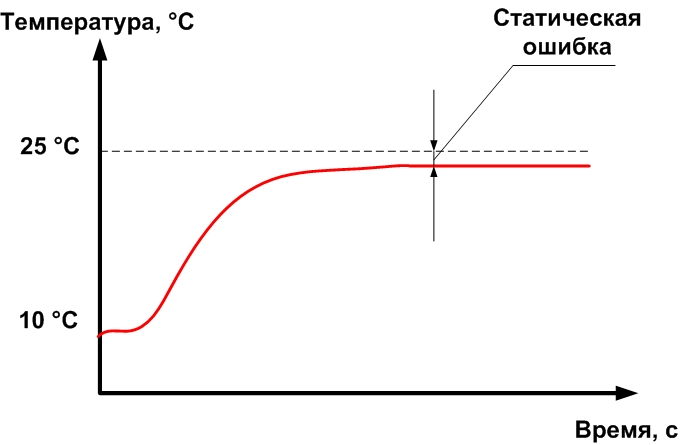
Для того чтобы исключить этот эффект, используют интегральную составляющую. Её необходимо постепенно увеличивать до исчезновение статической ошибки. Однако, чрезмерное её увеличение тоже может привести к возникновению скачков температуры.
Заключение
Настройка ПИД-регулятора довольно сложный и трудоёмкий процесс. На практике достаточно тяжело достичь оптимального регулирования и зачастую в этом нет необходимости. Чаще всего достаточно добиться такого вида переходного процесса, который устроит пользователя в условиях текущей задачи.

