Классификация двигателей. Свойства двигателей постоянного тока как генераторов в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с параллельным, независимым, последовательным и смешанным возбуждением. Схемы включения двигателей отличаются от схем включения соответствующих генераторов только наличием пускового реостата, который вводится для ограничения тока при пуске.
Обратимость электрической машины. Машина постоянного тока с независимым или параллельным возбуждением, подключенная к сети с постоянным напряжением, может работать как в генераторном, так и в двигательном режиме и переходить из одного режима работы в другой.
Для контура «обмотка якоря - сеть», согласно второму закону Кирхгофа,
E - U = Iа ΣRа ,
Откуда
I а = (E - U )/ΣR а . |
Если Е > U , то ток I а совпадает по направлению с ЭДС Е , и машина работает в генераторном режиме (рис. 8.58, а). При этом электромагнитный момент М противоположен направлению вращения п, т. е. является тормозным. Уравнение (8.79) для генераторного режима имеет вид
U = E - Iа ΣRа .
Если Е < U , то ток I а в уравнении (8.79) изменяет знак и направлен против ЭДС Е . В соответствии с этим изменяет знак и электромагнитный момент М , т. е. он действует по направлению вращения n . При этом машина работает в двигательном режиме (рис. 8.58,б) и уравнение (8.79) принимает вид
| U = E + Iа ΣRа , |
Если за положительное направление тока I а для двигательного режима принять его направление, встречное с ЭДС Е .
Таким образом, генераторы с независимым и параллельным возбуждением, подключенные к сети с напряжением U , автоматически переходят в двигательный режим, если их ЭДС Е меньше напряжения сети U . Эти двигатели автоматически переходят в генераторный режим, когда их ЭДС Е больше U . (8.83) (8.84)
При работе машины постоянного тока в двигательном режиме ЭДС Е и вращающий момент М определяются теми же формулами, что и в генераторном режиме:
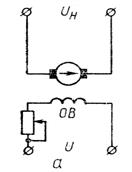
Двигатель с параллельным возбуждением. В этом двигателе (рис. 8.59, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат Rр.в ., а в цепь якоря - пусковой реостат R п . Характерной особенностью двигателя является то, что его ток возбуждения I в не зависит от тока якоря I а (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии согласно (8.84) и (8.85) получаем, что зависимости М = f(Ia ) и n = f(Ia ) (моментная и скоростная характеристики) линейные (рис. 8.59,б). Следовательно, линейна и механическая характеристика двигателя n = f(M) (рис. 8.60, а).
Если в цепь якоря включен добавочный резистор или реостат R п , то
п = [U - Iа (ΣR а + R п )]/(се Ф) = п 0 - Δn ,
где n 0 = U /(с е Ф) - частота вращения при холостом ходе; Δп = (ΣRа + R п )Iа /(се Ф) - снижение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя.Величина Δп , зависящая от суммы сопротивлений ΣR а + R п , определяет наклон скоростной n = f(Ia ) и механической n = f(M) характеристик к оси абсцисс. При отсутствии в цепи якоря добавочного сопротивления R п указанные характеристики жесткие (естественные характеристики 1 на рис. 8.59,б и 8.60,а ), так как падение напряжения Iа ΣRа в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3 - 5% от U ном . При включении добавочного реостата угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4 , соответствующих различным сопротивлениям реостата R пl . R п2 и R п3 . Чем больше сопротивление R п , тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Реакция якоря, уменьшая несколько поток машины Ф при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения n возрастает с увеличением момента М . Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные двигатели большой и средней мощностей с параллельным возбуждением часто имеют небольшую последовательную обмотку возбуждения, которая придает механической характеристике необходимый наклон. МДС этой обмотки при токе I ном составляет около 10% от МДС параллельной обмотки.
Регулировочный реостат R p.в позволяет изменять ток возбуждения двигателя I в и его магнитный поток Ф. Как следует из (8.86), при этом изменяется и частота вращения n . В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает (двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и может возникнуть круговой огонь.
Рабочие характеристики рассматриваемого двигателя (рис. 8.60,б) представляют собой зависимости потребляемой мощности Р 1 тока Ia ≈ Iн частоты вращения n , момента М и КПД η от отдаваемой мощности Р 2 на валу двигателя при U = const и I в = const. Характеристики n = f(P2 ) и М = f(P2 ) являются линейными, а зависимости Р1 = f(P2 ), Ia = f(P2 ) и η = f(P2 ) имеют характер, общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря I a .
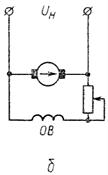
Если в двигателе обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, то его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения I в также не зависит от тока якоря I a .
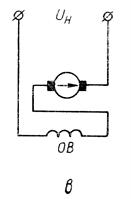
Двигатель с последовательным возбуждением. В этом двигателе (рис. 8.61, а) ток возбуждения Iв = Ia , поэтому магнитный поток Ф является некоторой функцией тока якоря I a . Характер этой функции изменяется в зависимости от нагрузки двигателя. При I a Iном, когда магнитная система машины не насыщена, Ф = kф Ia , причем коэффициент пропорциональности kф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф возрастает медленнее, чем I > Iном ) можно считать, что Ф ≈ const. В соответствии с этим изменяются в зависимости n = f(Ia ) и М = f(Ia ) .
При Ia ном скоростная характеристика двигателя n = f(Ia ) (рис. 8.61, б ) имеет форму гиперболы, так как частота вращения
| n = | U - Ia ∑Ra | = | U | - | Ia ∑Ra | = C1 | U | - C2 . |
| ce Ф | ce kф Ia | ce kф Ia | Ia |
Где С1 и С2 - постоянные.
При I a > I ном скоростная характеристика становится линейной, так как частота вращения
| n = | U - Ia ∑Ra | = | U | - | Ia ∑Ra | = C"1 U - C"2 Ia |
| ce Ф | ce Ф | ce Ф |
Где С "1 и С "2 - постоянные.
Аналогично можно получить зависимость электромагнитного момента от тока якоря М = f(Ia ) . При Ia ном моментная характеристика М = f(Ia ) имеет форму параболы. (рис. 8.61,б), так как электромагнитный момент
М = сМ ФÍ a = сМ k ф Iа 2= C 3 Iа 2 ,
Где С 3 - постоянная.
При I a > I ном моментная характеристика линейная, так как
М = сМ ФIa = C" 3 Iа ,
Где C"3 - постоянная. Механические характеристики n = f(М) (рис. 8.62, а ) можно построить на основании зависимостей n = f(Ia ) и М = f(Ia ) . При Ia ном частота вращения изменяется по закону
| n = | U | - | ∑Ra | = C4 | U | - C2 , |
| ce kф √M /(cм kф ) | ce kф | √M |
Где С4 - постоянная.
При I a > I ном зависимость n = f(М) становится линейной.
Включая в цепь якоря пусковые реостаты с сопротивлениями R п1 , R п2 и R п3 кроме естественной характеристики 1 можно получить семейство реостатных характеристик 2, 3 и 4 , причем, чем больше R п , тем ниже располагается характеристика.
Рабочие характеристики двигателя с последовательным возбуждением приведены на рис. 8.62, б . Зависимости n = f(Р2 ) М = f(Р2 ) являются нелинейными; зависимости P1 = f(Р2 ), Iа = f(Р2 ) и η = f(Р2 ) имеют примерно такой же характер, как и у двигателя с параллельным возбуждением.
Из рассмотрения рис. 8.62, а следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются мягкими и имеют гиперболический характер. При малых нагрузках частота вращения и резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода или при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2 ÷ 0,25) I ном ; только двигатели малой мощности (десятки ватт) используют для работы в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Это объясняется тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением. При жесткой характеристике частота вращения п почти не зависит от момента М , поэтому мощность
Р 2 = М ω = 2πnМ /60 = С 5 М ,
Где С5 - постоянная.
При мягкой характеристике двигателя с последовательным возбуждением частота вращения и обратно пропорциональна √М , вследствие чего
Р 2 = М ω = 2πnМ /60 = С" 5 √М ,
Где С5 - постоянная.
Поэтому при изменении нагрузочного момента в широких пределах мощность Р2 , а следовательно, мощность Р1 и ток Iа у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением; кроме того, они лучше переносят перегрузки. Например, при заданной кратности перегрузки по моменту М/М ном = k м ток якоря в двигателе с параллельным возбуждением увеличивается в k м раз, а в двигателе с последовательным возбуждением - только в √k м раз. Поэтому двигатель с последовательным возбуждением развивает больший пусковой момент, так как при заданной кратности пускового тока I п /I ном = k i пусковой момент его М п = ki 2 М ном , а у двигателя с параллельным возбуждением М п = ki М ном .
Указанные преимущества двигателей с последовательным возбуждением наиболее четко проявляются в простых приводах, не имеющих систем автоматического управления. При наличии таких систем предпочтение всегда отдается двига¬телям с параллельным или независимым возбуждением, у. которых с помощью регуляторов тока возбуждения можно получить требуемую форму механической характеристики, например гиперболическую.
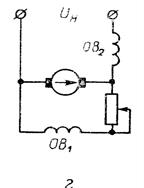
Двигатель со смешанным возбуждением. В этом двигателе (рис. 8.63, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения - параллельной и последовательной. Поэтому его механические характеристики (рис. 8.63,б , кривые 3 и 4) располагаются между характеристиками двигателей с параллельным (прямая 1 ) и последовательным (кривая 2 ) возбуждением. В зависимости от соотношения МДС параллельной и последовательной обмоток при
номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (при малой МДС последовательной обмотки) или к характеристике 2 (при малой МДС параллельной обмотки). Одним из достоинств двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения n0 имеет конечное значение.Рабочие характеристики ДПТ параллельного возбуждения малой мощности приведены на рис. 5.8.
Рабочие характеристики двигателя представляют собой зависимости скорости вращения n, потребляемого тока I и мощности P 1 , момента на валу двигателя M, коэффициента полезного действия η от полезной мощности P 2 при неизменном значении напряжения питания U н = const, тока обмотки возбуждения I вн =const и отсутствии добавочного сопротивления в якорной цепи R д я = 0. Они дают возможность судить об эксплуатационных свойствах двигателей и определять наиболее экономичные их режимы работы в условиях производства.
Механическая характеристика двигателя постоянного тока
Механическими характеристиками двигателя называются зависимости установившейся частоты вращения от момента на валу двигателя – n=f 1 (M) или ω=f 2 (M).
Характеристики называют естественными, если они получены при номинальных условиях питания (при номинальном напряжении), номинальном возбуждении и отсутствии добавочных сопротивлений в цепи якоря.
Характеристики двигателя называются искусственными при изменении любого из перечисленных выше факторов.
Подставим
в уравнение  ,выражения для
определения тока и ЭДС ДПТ
,выражения для
определения тока и ЭДС ДПТ
Е я = С Е nФ,
Механическая характеристика двигателя постоянного тока с независимым и параллельным возбуждением имеет вид:
 ,
,
где R яц = R я + R доб – полное сопротивление цепи якоря, Ом;
R Я – сопротивление обмотки якоря, Ом;
R доб – добавочное сопротивление в цепи якоря, Ом.
Анализируя выражение для построения механической характеристики, видим, что математически это уравнения прямой линии, пересекающей ось скоростей в точке n 0 , где
n 0
= U/(![]() ·Ф)
– скорость холостого хода.
·Ф)
– скорость холостого хода.
Естественная механическая характеристика показана на рис. 5.9.
Для построения естественной механической характеристики (ЕМХ) необходимо найти две точки.
Одна из них определяется из паспортных данных двигателя для номинальных значений n н и М н:
М н = P н /ω н, ω н = π·n н /30 = 0,105·n н,
где P н – номинальная мощность двигателя, Вт;
ω н – номинальная частота вращения, рад/сек.
Вторая точка соответствует идеальному холостому ходу, когда I = 0 и М=0.
Скорость холостого хода можно найти из следующего уравнения при подстановке паспортных данных двигателя:
 .
.
Регулирование скорости вращения дпт
Существует три основных способа регулирования частоты вращения машин постоянного тока: реостатное регулирование, регулирование изменением магнитного потока, регулирование изменением напряжения сети.
Реостатное
регулирование
частоты вращения осуществляется путем
введения в цепь якоря дополнительных
активных сопротивлений – резисторов,
т.е. R яц
= (R я
+ R доб)
= var при U = U н,
Ф = Ф н.
Как видно из уравнения механической
характеристики

при изменении величины добавочного сопротивления R доб в цепи якоря скорость идеального холостого хода n 0 остается постоянной изменяется лишь жесткость характеристики.
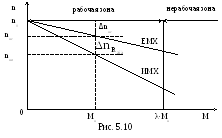 Искусственные
механические характеристики (ИМХ) при
введении добавочного сопротивления в
цепь ротора двигателя постоянного тока
независимого возбуждения показаны на
рис. 5.10.
Искусственные
механические характеристики (ИМХ) при
введении добавочного сопротивления в
цепь ротора двигателя постоянного тока
независимого возбуждения показаны на
рис. 5.10.
Регулирование частоты вращения при изменении магнитного потока осуществляется преимущественно за счет ослабления магнитного потока Ф возбуждения двигателя, т.е. за счет уменьшения тока возбуждения i в.
При уменьшении магнитного потока обычно соблюдаются условия: U = U н; R дя = 0. В этом случае для скорости идеального холостого хода имеем
 ,
тогда
,
тогда
 ,
,
где
 -
скорость холостого хода для искусственной
механической характеристики;
-
скорость холостого хода для искусственной
механической характеристики;
 -
скорость холостого хода для естественной
механической характеристики.
-
скорость холостого хода для естественной
механической характеристики.
Искусственные механические характеристики при уменьшении магнитного потока представлены на рис. 5.11.
Д ля
регулирования частоты вращения двигателя
постоянного токанезависимого
возбуждения изменением
питающего напряжения
необходимы регулируемые источники
напряжения.
ля
регулирования частоты вращения двигателя
постоянного токанезависимого
возбуждения изменением
питающего напряжения
необходимы регулируемые источники
напряжения.
Из
уравнения механической характеристики
видно, что с регулированием напряжения
связано изменение скорости идеального
холостого хода n 0
= U н /( ·Ф н)
при сохранении жесткости характеристик.
Это позволяет существенно расширить
диапазон регулирования. Регулирование
частоты вращения идет, как правило, вниз
от основной характеристики.Искусственные
характеристики при изменении
(уменьшении) напряжения
будут иметь вид прямых. Механические
характеристики двигателя постоянного
тока независимого возбуждения при
изменении напряжения питания показаны
на рис. 5. 12.
·Ф н)
при сохранении жесткости характеристик.
Это позволяет существенно расширить
диапазон регулирования. Регулирование
частоты вращения идет, как правило, вниз
от основной характеристики.Искусственные
характеристики при изменении
(уменьшении) напряжения
будут иметь вид прямых. Механические
характеристики двигателя постоянного
тока независимого возбуждения при
изменении напряжения питания показаны
на рис. 5. 12.
Двигатель постоянного тока - электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию. Простейший двигатель, состоит из статора, ротора и щёточноколлекторного узла. Рис.1а
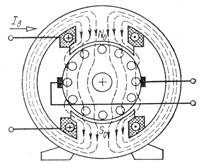
Рис.1а
На статоре ДПТ располагаются электромагниты с обмотками возбуждения - катушки, наводящие магнитный поток возбуждения
Ротор состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора).
Выводы всех катушек ротора объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных вдоль оси ротора. Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции - является датчиком углового положения ротора и переключателем тока со скользящими контактами. Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка - неподвижный контакт (обычно графитовый или медно-графитовый). Машины постоянного тока в основном делают многополюсными, при этом в каждой секции обмотки за один оборот значение и знак ЭДС изменяются столько раз, сколько полюсов. Магнитная цепь такой машины более сложная, при этом число пар щеток равно числу пар полюсов, а щетки одинаковой полярности соединяют вместе.
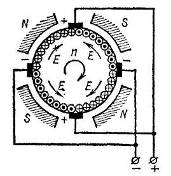
Двигатели постоянного тока обычно классифицируются
По способу включения обмоток возбуждения электромагнитов статора относительно обмотки ротора. Рис.1б. Последовательное возбуждение – обмотки статора включены последовательно с обмоткой ротора. Параллельное возбуждение - обмотки статора включены параллельно обмотке ротора. Смешанное возбуждение – когда обмотки возбуждения делятся на две части, одна включается последовательно, другая параллельно обмотке ротора. Независимое возбуждение – обмотки статора питаются от отдельного источника постоянного тока- возбудителя. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя.
Характеристики ДПТ
Механическая характеристика ДПТ представляет собой зависимость частоты вращения ротора двигателя от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) - момент на валу ротора, вертикальная ось (ординат) - частота вращения ротора. Механическая характеристика ДПТ есть линия, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ представляет собой зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) - напряжение питания обмоток ротора, вертикальная ось (ординат) - частота вращения ротора. Регулировочная характеристика ДПТ есть линия, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ. Управление двигателем осуществляется по току в обмотке ротора двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме. Основные формулы, используемые при управлении ДПТ:
M = k m I - момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора). k m - коэффициент момента двигателя.
E = k e ω - противоЭДС в обмотках якоря пропорционально угловой частоте вращения ротора. k e - коэффициент ЭДС двигателя.
U = RI - закон Ома для обмотки ротора. R - сопротивление обмотки ротора, I - ток в ней и U - напряжение, подаваемое на обмотку ротора.
Регулированием скорости называется целенаправленное принудительное изменение скорости двигателя посредством специального устройства или приспособления, независимо от величины и характера нагрузки, в соответствии с требованиями, предъявляемыми к закону движения рабочего органа механизма. Установленная при регулировании скорость при отсутствии воздействия на регулирующее приспособление в дальнейшем изменяется по механической характеристике электропривода в соответствии с нагрузкой. Регулирование скорости позволяет наиболее рационально использовать производственные механизмы, обеспечить оптимальные режимы их работы и, как правило, уменьшить расход энергии. Выражение скорости вращения двигателя постоянного тока:
показывает, что возможны три принципиально различных способа регулирования угловой скорости двигателя:
1) изменением тока возбуждения (магнитного потока) двигателя;
2) изменением сопротивления цепи якоря посредством резисторов (реостатное);
3) изменением подводимого к якорю двигателя напряжения.
В настоящее время в регулируемых по скорости или моменту электроприводах широко используются машины постоянного тока. Они изготавливаются мощностью от долей ватта до 12 МВт. Номинальное напряжение их не превышает 1500 В и только иногда в крупных машинах доходит до 3000 В. Частота вращения колеблется в широких пределах - от нескольких оборотов до нескольких тысяч оборотов в минуту.
Наиболее широко применяются машины постоянного тока с механическим коммутатором - коллектором. Хотя он усложняет условия работы, однако правильно спроектированная и качественно изготовленная машина постоянного тока является достаточно надежной. Машины постоянного тока, как и все электрические машины, обратимы, т. е. могут работать и как генераторы, и как двигатели. Конструктивно они выполнены одинаково. Однако с целью получения более экономичных режимов работы генераторы и электродвигатели проектируются и изготавливаются отдельно. В частности, они изготавливаются на разные напряжения: генераторы - на 115, 230, 460 В, двигатели - на 110, 220, 440 В.
Генераторы постоянного тока применяются в качестве возбудителей синхронных машин, сварочных генераторов, для питания гальванических ванн и двигателей постоянного тока, зарядки аккумуляторов.
Электродвигатели постоянного тока используются для электрической тяги, в подъемно-крановых установках, металлургической, бумажной промышленности и других отраслях, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах.
Электродвигатели постоянного тока. Технические характеристики
Основной серией машин постоянного тока общего назначения, изготавливаемых в СНГ, является серия 2П. Она охватывает диапазон мощностей от 0,37 до 200 кВт при высоте осей вращения 90 - 315 мм. Электродвигатели этой серии предназначены для широкорегулируемых электроприводов. Они заменяют машины серии П, а также специализированные машины серий ПС (Т), ПБС (Т), ПР. Приведем структуру условного обозначения машины постоянного тока серии 2П:
2П/1 Х/2 Х/3 Х/4 Х/5 Х/6,
где 1 - название серии (2П); 2 - исполнение по способу защиты и вентиляции: Ф - защищенное исполнение с независимой вентиляцией от постороннего вентилятора, Б - закрытое исполнение с естественным охлаждением, О - закрытое исполнение с внешним обдувом от вентилятора; 3 - высота осей вращения, мм; 4 - условное обозначение длины сердечника якоря: М - средняя, L - большая; 5 - буква F при наличии встроенного тахогенератора (при отсутствии тахогенератора буква Г не ставится); 6 - климатическое исполнение и категория размещения.
Электродвигатели серии 2П изготавливаются с полным числом добавочных полюсов. При этом двигатели с высотой оси вращения 90 и 100 мм - двухполюсные, 112 мм - четырехполюсные.
Двигатели типов 2ПН, 2ПФ обладают степенью защиты IP22, а типов 2ПБ и 2ПО - IP44. Двигатели со степенью защиты IP22 имеют центробежный реверсивный вентилятор, насаженный на вал якоря со стороны, противоположной коллектору.
Двигатели со степенью защиты IP44 имеют внешний центробежный вентилятор, который насажен на конец вала, противоположный приводу, и закрыт штампованным или сваренным кожухом из листовой стали толщиной 1-2 мм. Внутри таких двигателей со стороны, противоположной коллектору, размещается вентилятор-мешалка.
Для привода вентилятора в двигателях типа 2ПФ и 2ПО используется асинхронный двигатель типа 4АА56А4УЗ с синхронной частотой вращения 1500 об/мин.
В двигателях с высотой оси вращения 90 - 200 мм станина изготовлена из отрезков цельнотянутых труб, а с высотой оси вращения 225 -315 мм станины сварные, из толстолистового проката.
Соединение двигателей серии 2П с приводом осуществляется эластичной, зубчатой или клиноременной передачей. Рабочий конец вала - со стороны, противоположной коллектору.
Двигатели изготавливаются с независимым возбуждением. Напряжение возбуждения 110 или 220 В независимо от номинального напряжения якоря.
Режим работы машины серии 2П продолжительный (S1), средний срок службы 12 лет, средний ресурс 30000 ч.
Двигатели типа 2П...Г изготавливаются с тахогенератором типа ТС1, который имеет закрытое встроенное исполнение. Возбуждение тахогенератора от постоянных магнитов.
Номинальное напряжение якорной цепи машины серии 2П составляет 110, 220, 240 и 660В.
Машины новой серии 4П по сравнению с серией 2П характеризуются улучшенными массогабаритными показателями. Все машины этой серии имеют распределенную компенсационную обмотку, а магнитопроводы (сердечники) статора и якоря шихтованные.
В ряде машин серии 4П (например, типов 4ПО, 4ПБ) статоры изготовлены по типу статоров асинхронных двигателей и не имеют явных полюсов. Обмотка возбуждения укладывается в 2 паза в пределах полюсной дуги, компенсационная обмотка размещается равномерно во всех оставшихся пазах расточки статора.
Двигатели типов 4ПО, 4ПБ имеют степень защиты IP44. Они рассчитаны на длительный режим работы (S1), но допускают эксплуатацию в режимах S3 - S8, изготавливаются с параллельным или независимым возбуждением 220В.
Широкорегулируемые электродвигатели типа 4ПФ обладают степенью защиты IP23. Они поставляются со встроенным тахогенератором типа ТП80-20-0,23 и датчиком тепловой защиты. Возбуждение независимое от напряжения 110 и 220В.
Двигатели типа 4ПФ имеют статор восьмигранного сечения, который набирается из листов электротехнической стали толщиной 0,5 мм. Он запрессован между двумя нажимными плитами толщиной 10 мм из стального проката. В осевом направлении пакет статора стянут шпильками и приварен по углам по накладным планкам, которые обеспечивают поперечную жесткость. В нажимных плитах сделаны резьбовые отверстия для болтов крепления подшипниковых щитов.
Обмотки статора наматываются машинным способом.
Для вентиляции в статоре предусмотрены аксиальные каналы. Подшипниковые щиты - чугунные, литые. Лапы изготавливаются на подшипниковых щитах. Щеткодержатели - радиальные унифицированной конструкции.
Электродвигатели выполняются с подшипниками качения класса точности 6.
Для механизмов, эксплуатирующихся в тяжелых условиях (металлорежущие станки, металлургическое производство), изготавливаются крупные электродвигатели серии 4П с высотой оси вращения 350 и 450 мм.
В условном обозначении этих двигателей после серии (4П) последовательно указываются высота оси вращения, количество щеток на коллекторе, мощность при основном напряжении, климатическое исполнение (У или Т), категория размещения.
Двигатели могут изготавливаться на напряжение 440, 660, 750, 930 В. Возбуждение - независимое (напряжение 220 В). Основной режим работы продолжительный (S1), но допускается работа в режимах S3 - S8. Двигатели выполняются с тахогенератором постоянного тока и реле скорости. Вентиляция принудительная от отдельного вентилятора. Степень защиты IP44.
Электродвигатели постоянного тока серии ПГ (ПГТ) изготавливаются с гладким якорем и предназначены для работы в быстродействующих электроприводах слежения и широкорегулируемых электроприводах металлорежущих станков и других рабочих машин при питании от источников постоянного тока и полупроводниковых преобразователей. Электродвигатель может быть с тахогенератором типа TC-IM (серия ПГТ). Режим работы продолжительный (S1).
В условном обозначении последовательно указываются: серия (ПГ), буква Т - при наличии встроенного тахогенератора, мощность, М - модернизированный, климатическое исполнение, категория размещения.
Двигатели изготавливаются в защищенном исполнении, воздух продувается с помощью вентилятора-наездника, который приводится в движение асинхронным двигателем.
Двигатели серии ЭП предназначены для работы в широкорегулируемых электроприводах металлорежущих станков высокой точности и специальных установок. В условном обозначении после букв ЭП указывается: в числителе - номинальное напряжение, а в знаменателе - мощность (условно). Номинальный режим работы S1.
Для прокатных станов, шагающих экскаваторов, шахтных подъемников, гребных установок и испытательных стендов предназначены машины постоянного тока большой мощности серий П2 и МП. Их мощность составляет 3150 - 12 500 кВт при частоте вращения 36 -800 об/мин, напряжение - 440, 750, 930 В.
Для питания мощных двигателей постоянного тока главных приводов прокатных станов используют генераторы постоянного тока серии ГП.
Существуют серии машин постоянного тока специального назначения: крановые, металлургические, тяговые, микромашины систем автоматики.
Двигатели серии Д предназначены для специализированных кранов, вспомогательных металлургических механизмов с повторно-кратковременным режимом работы, большим числом включений, широким диапазоном регулирования скорости. При регулировании двигателей допускается увеличение напряжения до 440 В относительно номинального 220 В. Средняя скорость тихоходного исполнения 700; быстроходного - 1200 об/мин. Для тихоходных двигателей допустимое число включений в час составляет 2000, для быстроходных - 300. Класс нагревостойкости изоляции обмоток и коллектора Н (превышение температуры 120 °С).
Основное конструктивное исполнение двигателей закрытое со степенью защиты IP21. Двигатели серии Д810 - Д818 имеют разъемную станину. Оба конца вала двигателя одинаковые и могут передавать момент через шестерню, изготавливаются на мощность 2,5 - 185 кВт. Для тепловозов выпускаются генераторы постоянного тока серии ГП на мощность 700 - 2000 кВт, напряжение 310 - 810 В, частоту вращения 900 - 4220 об/мин и предназначены для питания тяговых электродвигателей. Станина генератора цилиндрическая с опорными лапами по бокам. Главные полюса шихтованные, на них расположены обмотки независимого и последовательного (для пуска дизеля) возбуждения. Добавочные полюса выполнены сплошными из толстолистовой стали.
В качестве тяговых электродвигателей тепловозов применяют машины постоянного тока последовательного возбуждения серии ЭД, которые изготавливаются на мощность 230 - 411кВт, напряжение 381 -700 В и частоту вращения 585 - 3050 об/мин. Двигатели имеют независимую вентиляцию и защищенное исполнение.
Для электровозов выпускаются тяговые электродвигатели серий ТЛ (670кВт, 1500 В), НБ (575 - 790кВт, 950 - 1100В), ДТ (465 кВт, 1500 В).
На городском электрифицированном транспорте применяют тяговые электродвигатели постоянного тока серии ДК. Они изготавливаются со степенью защиты IP20, с самовентиляцией, воздух подается со стороны коллектора. Серия ДК характеризуется мощностью 45 - 185 кВт, напряжением 275 - 750 В, средней частотой вращения 1500 об/мин. Для удобства обслуживания электродвигатели трамваев имеют только по два пальца щеткодержателей, которые расположены в нижней части станины.
Электродвигатели постоянного тока серии ДК (230 - 560 кВт, 550 -750 В, 550 - 1040 об/мин) предназначены для встраивания в колеса автосамосвалов и автопоездов грузоподъемностью 75 - 180 т. Двигатель встраивается в центральную часть колеса и крепится к неподвижной части фланцем, который расположен на круглой станине двигателя. Один шлицевый конец вала служит для передачи вращающего момента через редуктор планетарного типа, второй используют для крепления диска тормоза с электро- или пневмоприводом. Выводные концы привода расположены на подшипниковом щите со стороны коллектора. Двигатель не имеет коробки выводов.
Возбуждение электродвигателя последовательное, используется также обмотка независимого (параллельного) возбуждения. Двигатель имеет компенсационную обмотку для улучшения коммутации. Вентиляция двигателя независимая, с подачей воздуха через один из люков со стороны коллектора. Степень защиты IP20.
Для безрельсового напольного электротранспорта (погрузчики, электроштабелеры, электротягачи) выпускаются электродвигатели серий ЗДТ, ГТ, ДК, РТ, ЗДВ мощностью 1,35 - 21 кВт и напряжением 24 - 110В. Все двигатели четырехполюсные, обмотки якорей двигателей волновые, сделаны из прямоугольного медного провода и удерживаются в пазах бандажом из стеклоленты или стальной луженой проволоки.
Станины двигателей изготовляются из стальной прокатной трубы. Большинство электродвигателей имеет последовательное возбуждение и закрытое исполнение с естественным охлаждением.
Двигатели серий ДКВ и ДВ характеризуются взрывозащищенным исполнением.
Для привода рудничных аккумуляторных электровозов предназначены электродвигатели серий ДРТ, ДПТР мощностью 2,4 - 19 кВт и напряжением 80 - 250 В. Они имеют взрывозащитное исполнение и естественное охлаждение.
Двигатели постоянного тока серий ДК и ЭТ предназначены для контактных рудничных электровозов, которые работают в невзрывоопасной среде.
Крупные электрические машины постоянного тока используются для работы в приводах одноковшевых экскаваторов с емкостью ковша 4 м3 и более и в роторных экскаваторах.
Электродвигатели серий МПЭ и МПВЭ применяются для привода механизмов поворота, подъема, тяги и шагания экскаваторов и работают в режимах широкого регулирования скорости, частых реверсов с большими кратковременными перегрузками. Генераторы (серия ГПЭ), которые входят в состав преобразовательных агрегатов, предназначены для питания электродвигателей механизмов главных приводов экскаваторов.
Электродвигатели изготавливаются мощностью 500 - 1120 кВт и напряжением 440 В, а генераторы - 75 - 2500 кВт и напряжением 460, 630, 750, 930 и 1200 В.
Для питания двигателей приводов механизмов экскаваторов выпускаются также генераторы постоянного тока серий 2МП, 2ПЭ (14 -520кВт, 115 - 750 В, 1000 - 1500 об/мин).
Для экскаваторных электроприводов применяются также крановые электродвигатели постоянного тока экскаваторной модификации (серия ДЭ) мощностью до 200 кВт.
3 Устройство, принцип действия
Электрическая машина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1). Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение - создание магнитного потока. Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу - лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
Рисунок 1 – Машина постоянного тока:
I - вал; 2 - передний подшипниковый щит; 3 - коллектор; 4 - щеткодержатель; 5 - сердечник якоря с обмоткой; б - сердечник главного полюса; 7 - полюсная катушка; 8 - станина; 9 - задний подшипниковый щит; 10 - вентилятор; 11 - лапы; 12 - подшипник
![]()
Рисунок 2 – Полюса машины постоянного тока:
а - главный полюс; б - дополнительный полюс; в - обмотка главного полюса; г - обмотка дополнительного полюса; 1 - полюсный наконечник; 2 - сердечник
В полюсах различают сердечник и наконечник (рисунок 2). На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
Якорь машины постоянного тока состоит из вала, сердечника, обмотки и коллектора. Сердечник якоря собирается из штампованных листов электротехнической стали толщиной 0,5 мм и спрессовывается с обеих сторон с помощью нажимных шайб. В машинах с радиальной системой вентиляции листы сердечника собираются в отдельные пакеты толщиной 6-8 см, между которыми делают вентиляционные каналы шириной 1 см. При осевой вентиляции в сердечнике выполняют отверстие для прохождения воздуха вдоль вала. На внешней поверхности якоря имеются пазы для обмотки.
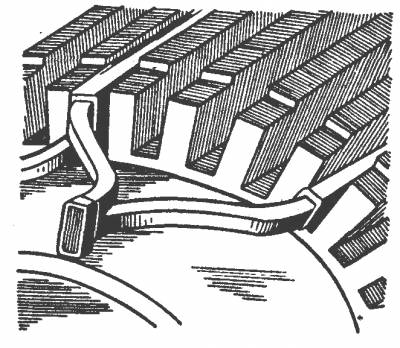
Рисунок 3 – Расположение секции обмотки якоря в пазах сердечника
Обмотка якоря изготавливается из медных проводов круглого или прямоугольного сечения в виде заранее выполненных секций (рисунок 3). Они укладываются в пазы, где тщательно изолируются. Обмотку делают двухслойной: размещают в каждом пазу две стороны разных якорных катушек - одну над другой. Обмотку закрепляют в пазах клиньями (деревянными, гетинаксовыми или текстолитовыми), а лобовые части крепят специальным проволочным бандажом. В некоторых конструкциях клинья не применяют, а обмотку крепят бандажом. Бандаж изготовляют из немагнитной стальной проволоки, которая наматывается с предварительным натяжением. В современных машинах для бандажировки якорей используют стеклянную ленту.
Коллектор машины постоянного тока собирается из клиноподобных пластин холоднокатаной меди. Пластины изолируют одну от другой прокладками из коллекторного миканита толщиной 0,5 - 1 мм. Нижние (узкие) края пластин имеют вырезы в виде "ласточкина хвоста", которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность "ласточкина хвоста", при втором - на "ласточкин хвост" и конец пластины.
Коллекторы с первым способом крепления называют арочными, со вторым - клиновыми. Наиболее распространены арочные коллекторы.
В коллекторных пластинах со стороны якоря при небольшой разнице в диаметрах коллектора и якоря делают выступы, в которых фрезеруют прорези (шлицы). В них укладывают концы обмотки якоря и припаивают оловянистым припоем. При большой разнице в диаметрах припайка к коллектору делается с помощью медных полосок, которые называются "петушками".
В быстроходных машинах большой мощности для предотвращения выпучивания пластин под действием центробежных сил применяют внешние изолированные бандажные кольца.
Щеточный аппарат состоит из траверсы, щеточных пальцев (болтов), щеткодержателей и щеток. Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Щеткодержатель состоит из обоймы, в которую помещается щетка, рычага для прижима щетки к коллектору и пружины. Давление на щетку составляет 0,02 - 0,04 МПа.
Для соединения щетки с электрической цепью имеется гибкий медный тросик.
В машинах малой мощности применяют трубчатые щеткодержатели, которые крепят в подшипниковом щите. Все щеткодержатели одной полярности соединяются между собой сборными шинами, которые подключаются к выводам машины.
Щетки (рисунок 4) в зависимости от состава порошка, способа изготовления и физических свойств разделяют на шесть основных групп: угольно-графитовые, графитовые, электрографитовые, медно-графитовые, бронзографитовые и серебряно-графитовые.
Подшипниковые щиты электрической машины служат в качестве соединительных деталей между станиной и якорем, а также опорной конструкцией для якоря, вал которого вращается в подшипниках, установленных в щитах.
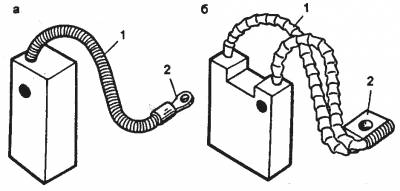
Рисунок 4 – Щетки:
а - для машин малой и средней мощности; б - для машин большой мощности; 1 - щеточный канатик; 2 - наконечник
Различают обычные и фланцевые подшипниковые щиты.
Подшипниковые щиты изготовляют из стали (реже из чугуна или алюминиевых сплавов) методом литья, а также сварки или штамповки. В центре щита делается расточка под подшипник качения: шариковый или роликовый. В машинах большой мощности в ряде случаев используют подшипники скольжения.
В последние годы статор двигателей постоянного тока собирают из отдельных листов электротехнической стали. В листе одновременно штампуются ярмо, пазы, главные и добавочные полюса.
Коэффициент полезного действия двигателя
Преобразование электрической энергии в механическую при работе ДПТ сопровождается потерями энергии. Отношение полезной механической мощности Р 2 на валу двигателя к потребляемой из сети электрической мощности Р 1 определяет коэффициент полезного действия (КПД) двигателей
η = ∙ 100% = ∙ 100%
Полезная механическая мощность Р 2 , снимаемая с вала двигателя, рассчитывается по формуле
Р 2 = 0,105 М ∙n , Вт (6.9)
где М = М С – момент сопротивления на валу двигателя, Нм;
n – частота вращения вала двигателя, об/мин.
Так как двигатель обладает «саморегулированием», то вращающий момент, развиваемый двигателем, …
равен моменту сопротивления на его валу, т.е. М ВР = М С = М, поэтому, зная полезную мощность двигателя, можно определить его вращающий момент по выражению
М = 9,55 , Нм (6.10)
Потребляемая двигателем мощность Р 1 определяется по формуле
Р 1 = U∙I = U∙ (I я + I в) , Вт (6.11)
где U – напряжение питания двигателя.
I = I я + I в — ток, потребляемый из сети двигателем с параллельным возбуждением.
ΔР = ΔР э +ΔР ст + ΔР мех — сумма всех потерь двигателя постоянного тока, Вт.
где ΔР э – электрические потери;
ΔР ст – потери в стали статора и якоря;
ΔР мех – механические потери.
Электрические потери ΔР э являются переменными, так как зависят от нагрузки и их значения может быть представлено как
ΔР э = ΔР я +ΔР в + ΔР щ
где ΔР я = I я 2 R я – потери в обмотке якоря (при номинальном режиме составляют 50% всех потерь);
ΔР в = I в 2 R в – потери в обмотке возбуждения;
ΔР щ = I я 2 ΔU щ – потери на коллекторно-щеточном контакте;
ΔU щ – падение напряжения между щеткой и коллектором (зависит от материала щеток: ΔU щ = 2 В для графитовых и 0,6 В для металлографитовых щеток.)
Потери в стали ΔР ст связаны с вихревыми токами и перемагничивании якоря при его вращении и составляет 1 – 3% от номинальной мощности двигателя.
Механические потери ΔР мех связаны с трением движущихся частей двигателя и составляют 1 -2 % от номинальной мощности двигателя. Эти потери, как и потери в стали, являются постоянными и не зависят от нагрузки двигателя. Их называют потерями холостого хода.
При работе ДПТ вхолостую Р 2 = 0 и η = 0 при увеличении полезной мощности Р 2 КПД растет. Двигатели рассчитывают так, чтобы максимальное значение КПД соответствовало номинальной мощности двигателя (при этом постоянные потери равны переменным). При нагрузке больше номинальной КПД уменьшается за счет значительного роста переменных потерь. Для машин мощностью 1 – 100 кВт номинальное значение КПД лежит в пределах 74 – 92 %.
Основными характеристика ДПТ, получаемыми теоретически или экспериментально, являются его механическая характеристика, а также рабочая и регулировочная характеристики.
Механической характеристикой двигателя называется зависимость частоты вращения якоря nот момента М на валу двигателя: n = f(М). Уравнением механической характеристики является выражение (6.7).
Механическая характеристика двигателя с параллельным возбуждением представляет собой прямую с незначительным наклоном по мере роста момента на валу (рис.6.7). Такая характеристика называется «жесткой».
Рис. 6.7. Механическая характеристика ДПТ с параллельным возбуждением.
Жесткость механической характеристики объясняется тем, что при параллельном включении обмотки возбуждения, с ростом момента нагрузки, ток возбуждения I в, а следовательно, и магнитный поток двигателя Ф остаются неизменными, а сопротивление якоря R я сравнительно мало.
Рабочие характеристики ДПТ представляют собой зависимости частоты вращения n, момента М, тока якоря I я и КПД η от полезной мощности Р 2 на валу двигателя при неизменном напряжении на его зажимах U = const.Рабочие характеристики ДПТ с параллельным возбуждением представлены на рис. 6.8.
Зависимость полезного момента на валу двигателя от нагрузки Р 2 представляет собой почти прямую линию, так как момент этого двигателя пропорционален нагрузке на валу: М = 9,55 Р 2 /n. Искривление указанной зависимости объясняется некоторым снижением частоты вращения с увеличением нагрузки. При Р 2 = 0 ток, потребляемый электродвигателем равен току холостого хода. При увеличении мощности, развиваемой электродвигателем, ток якоря увеличивается приблизительно по той же зависимости, что и момент нагрузки на валу, так как при условии Ф = const токе якоря пропорционален моменту нагрузки.
Рис. 6.8. Рабочие характеристики ДПТ с параллельным возбуждением.
В соответствии с тремя вышеуказанными способами регулирования частоты вращения двигателя, его регулировочными характеристиками являются зависимости: n = f(R я), n = f(I в), и n = f(U),
где R я – сопротивление якорной цепи, равное сумме сопротивлений самого якоря и реостата регулирования тока возбуждения;
I в – ток возбуждения, вызывающий пропорциональный ему магнитный поток возбуждения Ф;
U – напряжение, подаваемое на обмотку якоря, при соблюдении условия Ф = const, т.е. I в = const.
Примерный вид регулировочных характеристик, получаемых из выражения (6.7) при условии М = const, представлен на рис. 6.9.
Рис. 6.9. Регулировочные характеристики ДПТ с параллельным возбуждением: а) n = f(R я), б) n = f(I в) с) n = f(U).
1.ПОСТОЯННЫЙ ТОК…………………………………………………………..1
1.1. Простейшая цепь постоянного тока…………….………………………..1
1.2. Баланс мощностей в простейшей цепи постоянного тока………………..7
1.3. Последовательное соединение сопротивлений……………………………9
1.4. Параллельное соединения сопротивлений……………………………….10
1.5. Смешанное соединение сопротивлений……………………………….….12
1.6. Холостой ход и короткое замыкание ……………………………………13
1.7. Расчет сложных электрических цепей постоянного тока………………14
1.7.1. Метод непосредственного применения законов Кирхгофа………….14
1.7.2. Метод контурных токов…………………………………………………..17
2. ОДНОФАЗНЫЙ ПЕРЕМЕННЫЙ ТОК……………………………………18
2.1. Получение однофазного переменного тока……………………………..18
2.2. Цепь переменного тока с активным сопротивлением…………………..20
2.3 Цепь переменного тока с индуктивным сопротивлением……………….23
2.4. Цепь переменного тока с ёмкостным сопротивлением…………………25
2.5. Цепь переменного тока с последовательным
соединением активного, индуктивного и ёмкостного сопротивлений
(последовательная R-L-C цепь)……………………………………………….28
2.6. Резонанс напряжений……………………………………………………..31
2.7. Цепь переменного тока с параллельным соединением
активного, индуктивного и ёмкостного сопротивлений
(параллельная R-L-C цепь)……………………………………………….……34
2.8. Понятие эквивалентной проводимости………………………………….36
2.9. Резонанс токов……………………………………………………………..37
3. ТРЕХФАЗНЫЙ ПЕРЕМЕННЫЙ ТОК…………………………………….39
3.1. Трехфазный ток и его получение…………………………………………39
3.2. Соединение звездой. Четырехпроводная система трехфазного………41
3.3 Соединение звездой. Трехпроводная система трехфазного тока………46
3.4. Соединение по схеме «треугольник»…………………………………….48
3.5. Мощность трехфазной системы……………………………………………50
3.6. Измерения мощности потребляемой
трехфазными электроприемниками…………………………………..………..50
4. ТРАНСФОРМАТОРЫ………………………………………………………. 53
4.1. Назначение, области применения и классификация трансформаторов..53
4.2. Устройство и принцип работы однофазного
двухобмоточного трансформатора……………………………………………..54
4.3. Холостой ход трансформатора……………………………………………..56
4.4. Схема замещения трансформатора в режиме холостого хода.…………..60
4.5. Приведение вторичной обмотки трансформатора………………………..60
4.6. Схема замещения трансформатора в рабочем режиме……………………62
4.7. Векторная диаграмма рабочего режима трансформатора………………..63
4.8. Коэффициент полезного действия трансформатора………………………65
4.9. Экспериментальное определение параметров трансформаторов……….66
4.9.1. Опыт холостого хода……………………………………………………..67
4.9.2.. Опыт короткого замыкания……………………………………………..69
4.10 Нагрузочные характеристики трансформатора…………………………..71
5. АИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ… ………………………………72
5.1. Принцип действия и области применения асинхронных двигателей….72
5.2. Получение вращающегося магнитного поля……………………………..73
5.3. Конструкция асинхронных двигателей……………………………………77
5.4. Скольжение………………………………………………………………….78
5.5. Магнитные потоки и ЭДС асинхронного двигателя…………………….79
5.6. Основные уравнения асинхронного двигателя……………………….…..80
5.7. Приведение параметров обмотки ротора к обмотке статора…………….81
5.8. Векторная диаграмма асинхронного двигателя…………………………..82
5.9. Схема замещения асинхронного двигателя………………………………82
5.10. Потери мощности и КПД асинхронного двигателя……………..…….83
5.11. Уравнение вращающего момента………………………………….…….85
5.12. Механические характеристики асинхронного двигателя………………85
5.13. Рабочие характеристики асинхронного двигателя………………………88
5.14. Пуск, регулирование частоты вращения и торможение
асинхронного двигателя……………………………..…………………………88
6. ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА…………………………90
6.1. Назначение, устройство и способы возбуждения
двигателей постоянного тока……………………………………………..…….90
6.2. Принцип действия двигателя постоянного тока
и его основные уравнения………………………………………………………92
6.3. Пуск и реверсирование двигателя постоянного тока…………………….94
6.4. Регулирование скорости вращения двигателя……………………………96
6.5. Коэффициент полезного действия двигателя…………………………….98
6.6. Основные характеристики двигателя постоянного тока…………………99