La tâche principale du contrôleur de réfrigérateur est de maintenir la température réglée dans la chambre. Cela sera fait par un contrôleur de température en raison des changements de puissance électrique sur le module Peltier.
Dans la leçon précédente, nous avons développé un régulateur de puissance. La connexion entre les contrôleurs de puissance et de température ressemble à ceci.
- Le régulateur de température reçoit la température mesurée, la compare à la température réglée et calcule la valeur de la puissance réglée pour le régulateur de puissance.
- Le contrôleur de puissance génère un PWM correspondant à une puissance donnée.
Nous avons construit le régulateur de puissance selon la loi intégrale de la réglementation. Pour stabiliser la température, nous utiliserons un algorithme de contrôle plus complexe - le contrôleur à différenciation proportionnelle intégrale (PID).

Il existe une relation très étroite entre le courant électrique et les champs magnétiques qui déterminent les équations de Maxwell, et il s'avère que lorsque nous conduisons du courant à travers un conducteur immergé dans un champ magnétique, il subit une force mécanique, que nous appelons électromotrice et que nous pouvons utiliser comme principe principal de fonctionnement moteur électrique.
D'un point de vue pratique, si nous passons un courant à travers un fil qui se trouve entre les pôles d'un aimant, une force mécanique apparaîtra qui résistera aux changements de ce courant et tentera de tourner le conducteur pour les compenser. La force qui apparaît sera proportionnelle à l'intensité du champ magnétique et au nombre de conducteurs traversant le courant.
Contrôleur PID.
Dans la leçon précédente, j'ai parlé en détail. Il a souligné ses forces et ses faiblesses.
Un régulateur fonctionnant sur ce principe est très précis. Les autres critères de qualité de la régulation - vitesse et stabilité - ne sont pas à sa hauteur.
Afin d'atteindre des performances élevées pour tous les critères, il est nécessaire d'utiliser un régulateur combinant différentes lois de régulation.
Tous les moteurs électriques ont deux parties principales. Le stator ou la partie fixe, qui comprend généralement des aimants fixes ou génère un champ alternatif avec un courant alternatif. Le rotor dans lequel nous avons des spires ou des enroulements de fils de cuivre autour du noyau, de sorte que la force qui agit sur le rotor est multipliée proportionnellement à ce nombre. Bien sûr, puisque la force électromotrice fait tourner une partie du rotor vers l'arrière, nous constatons finalement que nous atteindrons une position d'équilibre qui ne nous convient pas du tout, car cela arrêterait la rotation du moteur.
Un tel dispositif est un contrôleur à différenciation proportionnelle intégrale (PID). Il génère un signal de sortie, qui est la somme de trois composants avec des caractéristiques de transfert différentes. Pour cette raison, le contrôleur PID fournit un contrôle de haute qualité et vous permet d'optimiser le contrôle selon des critères individuels.
C'est pourquoi nous devons compliquer un peu plus la situation et nous assurer d'avoir plusieurs groupes de virages dans des positions différentes, de sorte que lorsqu'un groupe atteint l'équilibre, l'autre prend le relais et le moteur continue de tourner. Regardez les blocs noirs marqués d'un et - qui restent statiques lorsque vous alimentez une paire de bobines avec des enroulements opposés.
Ainsi, il y a toujours un fil conducteur d'une position d'équilibre qui subit une force électromotrice et fait tourner le moteur à la recherche d'un équilibre que nous ne lui permettons jamais d'atteindre. Les bobines de rotor sont des enroulements de fil et les aimants sont des aimants. Lors de la session, nous avons vu qu'il est très facile de faire tourner un petit moteur à travers un transistor qui régule le courant que nous délivrons.
Dans la formation du signal de sortie du contrôleur PID impliqué:
- Composante proportionnelle - la valeur est proportionnelle à l'erreur de mésappariement (la différence entre les valeurs définies et réelles du paramètre ajustable).
- Composant d'intégration - l'erreur erreur intégrale.
- Composant différenciateur Est la dérivée de l'erreur de non-concordance.
La forme mathématique de la loi du contrôleur PID est:
Dans cette session, nous nous sommes concentrés presque exclusivement sur le transistor, pour introduire ce composant, que nous utiliserons encore et encore, et pour utiliser pratiquement le moteur comme excuse, sans entrer dans le sujet. Mais cette fois, nous voulons nous concentrer sur la moto et la façon dont nous la contrôlons, et donc nous reviendrons sur cet exemple, mais compliquons-le un peu plus en ajoutant un potentiomètre qui nous permet de changer la vitesse du moteur.
Nous allons répéter le montage que nous avons vu lors de la session avec cette moto. Ici, vous avez le circuit initial sans potentiomètre afin de vérifier les connexions du moteur et qu'il fonctionne correctement avant de suivre. 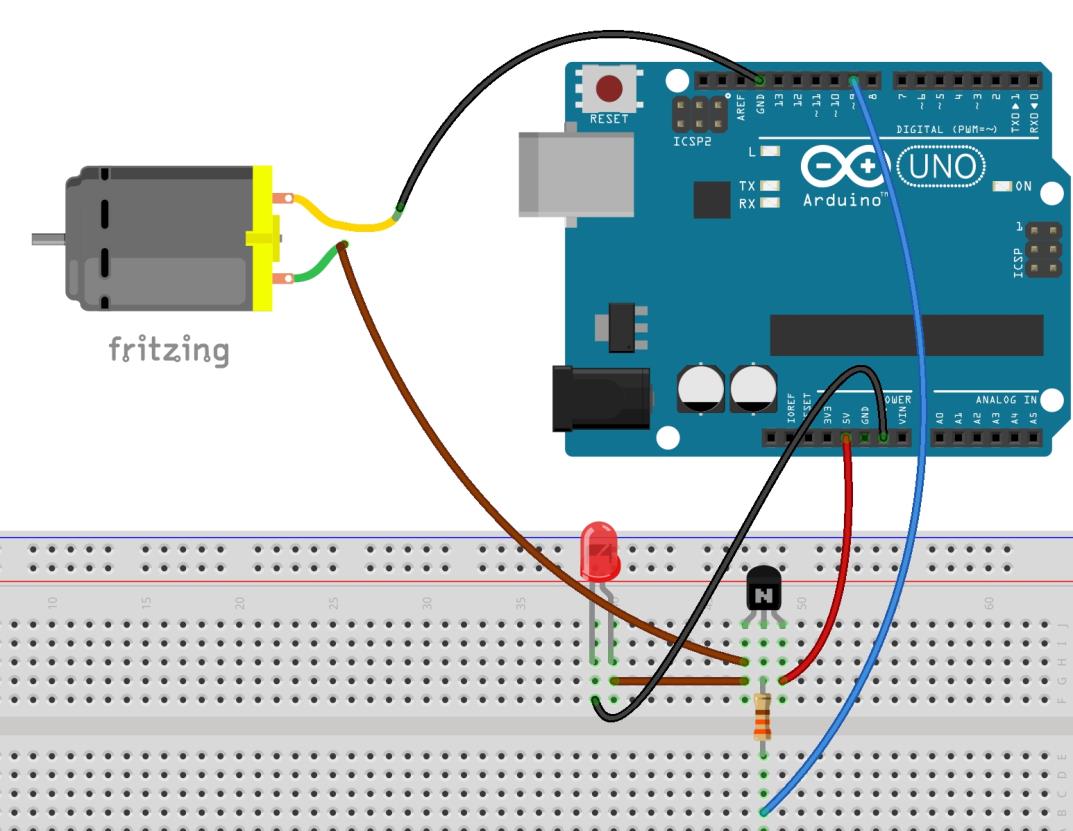
Pour vérifier le fonctionnement du moteur, vous pouvez télécharger ce petit programme, qui change simplement la tension que nous avons mise dans la broche 9 pour changer la vitesse du moteur.
o (t) \u003d P + I + D \u003d K p e (t) + K i ∫e (t) dt + K d de (t) / dt
- o (t) est le signal de sortie;
- P est la composante proportionnelle;
- I - composant intégrateur;
- D est un élément différenciateur;
- Kp, Ki, Kd - coefficients de liens proportionnels, intégrateurs, différenciateurs;
- e (t) est une erreur de non-concordance.
Sous une forme schématique, le contrôleur PID peut être représenté comme suit.
Comme vous le verrez, il suffit de mettre la valeur analogique dans le contact. Nous pouvons contrôler la vitesse du moteur en modifiant la tension que nous injectons dans la base du transistor, car cela régule la résistance que le transistor représente entre l'émetteur et le collecteur.
A 0 V, le transistor passe en coupe, et à 5 V il est saturé, avec lequel il a une résistance nulle. En dessous d'un certain seuil, il s'arrête et ne tourne que lorsqu'il est dépassé. En augmentant la valeur de tension, nous donnons que la vitesse de rotation du moteur augmentera progressivement. Dans ce cas, nous changerons la vitesse de rotation. Convertisseurs de vitesse et de courant Vérification de l'état de l'étage de puissance Vérification de l'état de l'étage de commande Installation de l'onduleur Réglage manuel avec un multimètre Réglage manuel avec un oscilloscope.

Le schéma fonctionnel du régulateur de tension PID U ressemble à ceci.

- La tension mesurée Ureal (t) est soustraite de l'Uset donné.
- L'erreur de non-concordance résultante e (t) est transmise aux liaisons proportionnelles, d'intégration et de différenciation.
- À la suite de la somme des composants, une action de commande o (t) est obtenue, qui est fournie à l'élément de commande.
Avec l'implémentation logicielle du contrôleur PID, le signal de sortie est calculé à intervalles réguliers. C'est-à-dire le contrôleur est discret dans le temps. Par conséquent, plus loin j'utiliserai les expressions: l'état précédent du signal, la valeur précédente, etc. Nous parlons de l'état du système au moment précédent de l'échantillonnage.
Avantages d'utiliser un convertisseur privé sur un microcontrôleur Arduino
Ces applications vont du contrôle du régime moteur au contrôle de sa position. De plus, pour la même puissance, ces machines ont des dimensions et des coûts supérieurs à moteurs asynchrones, et nécessitent une maintenance supplémentaire grâce à l'interrupteur.
Utilisation de PWM pour régler la vitesse du moteur
En modifiant la tension aux bornes de l'armature Contrôle rhéostatique de la tension des raccords. Changer l'embrayage de deux moteurs à engrenages. En modifiant le flux de champ: Rhéostat de régulation de champ. Pour changer le sens de rotation, il est nécessaire de changer le champ magnétique dans l'un des deux circuits moteurs. En pratique, un changement de direction du champ magnétique est effectué sur l'enroulement d'induit, comme illustré sur la figure.
Composants du contrôleur PID.
Encore une fois. Le signal de sortie du contrôleur PID est la somme de trois composants:
- proportionnelle;
- intégrer;
- différencier.
Composante proportionnelle.
P (t) \u003d K p * e (t)
Il n'a pas de mémoire, c'est-à-dire la valeur du signal de sortie ne dépend pas de l'état précédent du système. Seule l'erreur de l'erreur, multipliée par le coefficient, est transmise à la sortie. Le signal de sortie compense l'écart du paramètre réglable. Plus le signal est grand, plus l'erreur de décalage est grande. Si l'erreur est 0, le signal de sortie est également 0.
Ce que vous devez savoir avant de commencer à travailler avec Arduino?
Cet objectif peut être atteint par: L'inhibition de la récupération d'énergie ou encore appelée régénérative. Freinage rhéostatique ou encore appelé freinage dynamique. Freinage inversé à l'ancre. Cette tension alimente l'armature du moteur. Le champ actuel du moteur est constant.
L'interaction des champs magnétiques des deux composants provoque la rotation du rotor. La scène peut être implémentée à l'aide de: Transistors à thyristors. Dessin. Un tel freinage dynamique n'agit que lorsque l'ancre est en mouvement. Cette configuration permet un fonctionnement bidirectionnel sans utiliser de contacteurs d'inversion et de freinage régénératif contrôlé. Cette énergie doit en quelque sorte être absorbée par la source. La figure 6 montre que lors du freinage, la polarité de l'armature ne change pas, mais la direction du courant.
La composante proportionnelle n'est pas en mesure de compenser complètement l'erreur. Cela peut être vu à partir de la formule. Le signal de sortie est Kp fois l'erreur. Si l'erreur de l'erreur est égale à 0, alors le signal de sortie du contrôleur est égal à 0. Et puis il n'y a rien à compenser.
Par conséquent, il y a toujours une erreur dite statique dans les contrôleurs proportionnels. Il peut être réduit en augmentant le coefficient Kp, mais cela peut conduire à une diminution de la stabilité du système et même à des auto-oscillations.
Cela signifie que pour le freinage à récupération, la tension au niveau de l'induit doit être inférieure à la tension contre-électromotrice. La durée de vie des moteurs à aimants permanents dépend de la durée de conservation du flux magnétique nominal pour lequel ils ont été fabriqués. Si le flux magnétique du moteur diminue, il perd son couple nominal et son fonctionnement n'est pas efficace et peut être surchargé par un courant excessif.
Valeur de référence de vitesse entrant dans l'unité de comparaison. L'erreur de vitesse est le résultat de la comparaison des signaux indiqués par la valeur de référence de vitesse et le retour de vitesse. # Unité de contrôle de vitesse. Réagit avec des caractéristiques proportionnelles intégrales avant une erreur de vitesse qui arrive à son entrée. Valeur de référence du couple. Il est nommé ainsi car il est comparé au retour de courant, qui est proportionnel au couple développé par le moteur. # Ceci résulte de la comparaison de signaux appelés valeur de couple de référence et retour de courant. # Réagit avec des caractéristiques proportionnelles intégrées en raison d'une erreur de couple qu'il reçoit à son entrée.
Les inconvénients des contrôleurs proportionnels comprennent:
- la présence d'une erreur réglementaire statique;
- faible stabilité avec coefficient croissant.
Il y a un avantage significatif:
- Régulation à grande vitesse. La réponse du contrôleur proportionnel à l'erreur de non-concordance n'est limitée que par le temps d'échantillonnage du système.
Les régulateurs qui fonctionnent uniquement selon la loi proportionnelle sont rarement utilisés.
Il s'agit d'un signal de mesure de vitesse indirecte, prenant un échantillon de la tension d'induit. Cette valeur a une erreur inhérente à la vitesse mesurée en raison de la chute, la raison pour laquelle le variateur perd de sa précision lorsqu'il essaie de contrôler la vitesse. Pour minimiser ce problème, méthode de compensation.
Il s'agit directement d'un signal de mesure de vitesse. Un compteur de vitesse est fixé directement sur l'arbre du moteur. Il existe deux types de compteurs appelés: déclencheur et encodeur. L'utilisation d'un générateur tachymétrique permet une précision de vitesse de l'ordre de ± 0, 1%. L'encodeur fournit quatre des deux signaux numériques qui fournissent des informations sur la vitesse, le sens de rotation et l'emplacement. L'utilisation du capteur offre une précision de vitesse de l'ordre de ± 0,01%. Le contrôleur compare les instructions avec un retour sur la tension et le courant et transmet le signal correspondant au circuit de déclenchement.
La tâche principale du composant proportionnel dans le contrôleur PID est d'augmenter la vitesse.
Composant intégrateur.
I (t) \u003d K i ∫e (t) dt
Proportionnelle à l'intégrale de non-correspondance d'erreur. Compte tenu de la résolution temporelle du contrôleur, vous pouvez écrire ceci:
I (t) \u003d I (t -1) + K i * e (t)
- I (t-1) est la valeur de I au point d'échantillonnage précédent.
L'erreur de non-concordance est multipliée par un coefficient et ajoutée à la valeur précédente de la liaison d'intégration. C'est-à-dire le signal de sortie s'accumule tout le temps et avec le temps augmente son effet sur l'objet. Ainsi, l'erreur de mésappariement est entièrement compensée même pour de petites valeurs de l'erreur et du coefficient Ki. En régime permanent, le signal de sortie du contrôleur est entièrement fourni par le composant d'intégration.
Cette étape définit les impulsions d'arrêt, qui activent les transistors ou thyristors, provoquant leur conductivité. Dans certains modèles, le déclencheur et le circuit sont connectés dans le même circuit numérique. La qualité de ceux-ci et des régulateurs détermine la précision globale de l'onduleur. La figure 9 montre que les bobines de champ et les ancres sont alimentées par des circuits indépendants. En règle générale, la puissance recevant le champ est constante, elle facilite donc la caractéristique de contrôle du couple, qui ne dépendra que du courant appliqué à la vanne.
La figure 11 montre le mode de contrôle mentionné, qui est du type «contrôle vectoriel», car il a la capacité de contrôler indépendamment les courants qui créent le débit et le couple dans le moteur afin de contrôler avec précision son couple et sa puissance. Veuillez noter qu'à mesure que la charge sur le moteur augmente, la vitesse diminue et donc l'onduleur doit être en mesure de fournir plus de moteur pour compenser cette augmentation de charge et ainsi maintenir une vitesse constante.
Les inconvénients du régulateur intégré comprennent:
- basse vitesse;
- stabilité médiocre.
Avantage:
- La capacité de compenser entièrement l'erreur de décalage à tout gain.
Dans la pratique, les régulateurs intégrateurs (uniquement le composant intégrateur) et l'intégration proportionnelle (composants intégrateurs et proportionnels) sont souvent utilisés.
Parmi les transducteurs utilisés pour mesurer la vitesse, nous avons: La valeur physique de la vitesse angulaire peut être changée en la valeur physique de la tension. L'amplitude du courant physique change en tension. La valeur physique du mouvement angulaire se transforme en contraintes sinusoïdales.
Dans ce cas, les capteurs peuvent être des contacts électriques ou un système photovoltaïque. Divers codes, les plus courants binaires et gris, peuvent être utilisés, et des résolutions et une précision très élevées de l'ordre de 16 bits et plus peuvent être atteintes. Cette méthode présente l'inconvénient de son coût élevé et pose le problème de la transmission de données en parallèle si le codeur est éloigné du système de mesure électronique. La solution comme mesure d'angle de mesure présente plusieurs avantages. Premièrement, il s'agit d'un appareil mécanique fiable qui peut résister à des environnements agressifs de poussière, d'huile, de températures extrêmes et de radiations.
La tâche principale de la liaison d'intégration dans le contrôleur PID est de compenser l'erreur statique et d'assurer une grande précision de régulation.
Composant différenciateur.
D (t) \u003d K d de (t) / dt
Proportionnelle au taux de variation de l'erreur de non-concordance. Un indicateur particulier de l'accélération de l'erreur de décalage. Le composant de différenciation prédit les écarts du paramètre contrôlé dans le futur et contrebalance cet écart. En règle générale, il compense le retard de l'impact du régulateur sur l'objet et augmente la stabilité du système.
Contrôle de vitesse du moteur asynchrone monophasé avec Arduino
Deuxièmement, puisqu'il s'agit d'un transformateur, il introduit la séparation des signaux et la déviation naturelle du mode général de bruit électrique. Cette caractéristique, combinée au fait que seuls quatre fils sont nécessaires pour transmettre des données angulaires, rend le résolveur unique dans la mesure des angles et est idéal pour fonctionner dans des conditions environnementales difficiles dans les industries lourdes et aérospatiales. Des résolveurs sans balais sont actuellement disponibles qui ne nécessitent aucun contact avec le rotor, ce qui augmente considérablement la durée de vie et la fiabilité de l'appareil.
Compte tenu de la résolution temporelle du contrôleur, la composante de différenciation peut être calculée comme suit:
D (t) \u003d K d * (e (t) - e (t -1))
Il montre à quel point la valeur de l'erreur de non-concordance a changé pour une unité temporaire de discrétion du contrôleur.
Il n'existe pas de régulateurs constitués d'un seul lien de différenciation.
La tâche principale du lien de différenciation dans le contrôleur PID est d'augmenter la stabilité.
Réglage de contrôle PID.
La qualité du contrôle PID dépend largement de la sélection optimale des coefficients. Les coefficients du contrôleur PID sont déterminés en pratique dans un système avec un objet réel par sélection. Il existe différentes méthodes de configuration. Je ne parlerai que des principes généraux.
La qualité de la régulation est jugée par la réponse transitoire du régulateur. C'est-à-dire selon le calendrier de changement du paramètre contrôlé dans le temps.
Aux points traditionnels de la séquence de réglage du contrôleur PID, j'ajouterais que, tout d'abord, il est nécessaire de déterminer quels critères de qualité réglementaire sont préférables.
Dans la leçon précédente, lors du développement d'un régulateur de puissance, nous nous sommes principalement intéressés à la précision et à la stabilité. Et nous avons même artificiellement réduit la vitesse. Certains régulateurs fonctionnent dans des conditions d'interférences importantes et la stabilité est plus importante pour eux, tandis que d'autres nécessitent des performances élevées, même au détriment de la précision. Les critères d'optimisation peuvent varier. En général, les contrôleurs PID sont réglés pour fournir tous les critères de contrôle qualité à un niveau élevé.
Les composants du contrôleur PID sont configurés séparément.
- Les liens d'intégration et de différenciation sont déconnectés et le coefficient du lien proportionnel est sélectionné. Si le régulateur s'intègre proportionnellement (il n'y a pas d'élément de différenciation), alors ils obtiennent une absence totale d'oscillations sur la caractéristique de transition. Lorsque le régulateur est réglé sur haute vitesse, des fluctuations peuvent persister. Ils essaieront de compenser le lien de différenciation.
- Un lien de différenciation est connecté. Son coefficient cherche à supprimer les fluctuations du paramètre de régulation. S'il échoue, réduisez le coefficient proportionnel.
- En raison de la liaison d'intégration, l'erreur de non-concordance résiduelle est supprimée.
Le réglage du contrôleur PID est itératif. C'est-à-dire les points de sélection des coefficients peuvent être répétés plusieurs fois jusqu'à ce qu'un résultat acceptable soit atteint.
En raison de leur haute performance et de leur polyvalence, les contrôleurs PID sont largement utilisés dans les systèmes d'automatisation industriels.
Dans la prochaine leçon, nous développerons un régulateur de température PID.
Les moteurs sont dans presque tous les robots. Dans certains robots, ils entraînent des roues, forçant la voiture à se déplacer dans la bonne direction. Dans d'autres, les moteurs font tourner les hélices, créant une poussée verticale pour le vol. Les moteurs permettent aux articulations du bras robotique industriel de tourner et de déplacer le chariot de l'imprimante 3D. En général, un robot ne peut pas être fabriqué sans un bon moteur.
Il existe de nombreux types de moteurs. Les plus courants en robotique incluent le moteur courant continu, moteur pas à paset moteur sans balais. Chaque type a ses propres caractéristiques, avantages et inconvénients. Certains sont plus adaptés à des mouvements précis, tandis que d'autres permettent d'élever facilement le quadcopter dans le ciel. Pour chaque projet, vous devez sélectionner soigneusement le type de moteur souhaité.
Dans cette leçon, nous allons vous montrer comment contrôler un moteur à courant continu. Les moteurs de ce type de pièce sont utilisés dans les robots sur plates-formes à roues et à chenilles. Et nous commencerons par la manière la plus simple de gérer.
1. Transistor
Chaque robotique débutant est confronté au problème de la connexion du moteur au microcontrôleur. Après avoir passé, il semble que vous pouvez faire de même avec le moteur: connectez-le aux broches numériques Arduino, puis activez et désactivez le programme. Mais ça y était. Même un petit moteur, souvent utilisé dans divers types de jouets, nécessite un courant de 200 mA à 1 Ampère pour son fonctionnement. Et la sortie numérique Arduino ne peut nous donner que 20mA. La plupart des moteurs puissants nécessitent une tension supérieure à 5 volts, familière à Arduino. Les moteurs pour 12, 24 et 48 volts sont courants. En d'autres termes, l'Arduino est très faible pour le contrôle direct du moteur. Besoin d'une sorte d'intermédiaire puissant!
L'intermédiaire le plus simple est un transistor. Les transistors à effet de champ et bipolaires, fonctionnant en mode clé, conviennent. Ce qui suit est un circuit de commande de moteur utilisant un transistor bipolaire NPN.

Comme vous pouvez le voir, le schéma est très simple. Nous transmettons un signal faible de l'Arduino à travers la résistance 1kOhm à la base du transistor, à la suite de quoi le transistor ouvre un canal puissant à travers lequel le courant passe de plus à moins à travers le moteur. En fait, nous avons obtenu une primitive conducteur de moteur!
Une diode de protection doit être installée dans le circuit, par exemple 1N4001 ou 1N4007. Cette diode ne permettra pas au transistor et au contrôleur de griller au moment où le moteur s'arrête, lorsque l'EMF d'auto-induction crée un saut de tension sur les enroulements.
Dans ce circuit, on peut utiliser, par exemple, le transistor NPN 2N2222A. Ce transistor bipolaire peut contrôler le courant jusqu'à 1A et la tension jusqu'à 40V, de sorte qu'il peut être complètement utilisé pour les petits moteurs. L'analogue russe de ce transistor est le KT315.
Avec un seul transistor, nous pouvons activer et désactiver le moteur à courant continu dans une seule direction. Mais le robot à roues doit se déplacer dans un sens et dans l'autre. Que faire Besoin d'un pilote plus avancé.
2. Pont en H
Après avoir compilé les transistors d'une certaine manière, nous obtenons un dispositif pour contrôler la rotation du moteur dans les deux sens. Un tel appareil est appelé Pont en H. Voici à quoi ressemble le pont en H sur les transistors bipolaires:

INA et INB sur la figure sont l'entrée de signaux de commande faibles. Dans le cas d'Arduino, il est nécessaire de leur appliquer soit 0 (masse) soit + 5V. VCC est la puissance des moteurs, elle peut être plusieurs fois supérieure à la tension du signal de commande. GND est le terrain commun à Arduino et au pont en H.
Selon laquelle des entrées nous donnons un signal positif, le moteur tournera dans l'une ou l'autre direction. En règle générale, en plus du pont H lui-même, des diodes de protection, des filtres, des optocoupleurs et d'autres améliorations sont ajoutés au circuit de commande du moteur CC.
3. Pilote IC L293D
Bien sûr, il n'est pas nécessaire d'assembler le pilote de moteur manuellement à partir de transistors individuels. Il existe de nombreux circuits prêts à l'emploi qui vous permettent de contrôler différents types de moteurs. Nous considérons commun pilote L293D.

Le microcircuit se compose de deux ponts en H, ce qui signifie que vous pouvez contrôler deux moteurs à la fois. Chaque pont est équipé de quatre diodes de protection et d'une protection contre la surchauffe. Le courant maximal que le L293D peut transmettre au moteur est de 1,2 A. Courant de fonctionnement - 600mA. La tension maximale est de 36 V.
4. Connexion
La puce L293D possède un boîtier DIP à 16 broches. Le schéma de circuit ci-dessous.

N'oubliez pas que le compte à rebours des fils se fait dans le sens antihoraire et commence à partir de l'évidement dans le logement de la puce.
- + V - puce d'alimentation, 5V;
- + Vmotor - puissance du moteur, jusqu'à 36V;
- 0V - terre;
- En1, En2 - Sorties marche / arrêt du pont en H;
- In1, In2 - fils de commande du premier pont en H;
- Out1, Out2 - conclusions pour la connexion du premier moteur;
- In3, In4 - bornes de commande du deuxième pont en H;
- Out3, Out4 - conclusions pour la connexion d'un deuxième moteur.
Les broches En1 et En2 sont utilisées pour désactiver ou activer les ponts. Si nous alimentons 0 à En, le pont correspondant s'éteint complètement et le moteur cesse de tourner. Ces signaux nous sont utiles pour contrôler la poussée du moteur à l'aide d'un signal PWM.
Schéma de connexion pour Arduino Uno
| Driver L293D | In1 | In2 | In3 | In4 | En1 | En2 | V + | Vmotor + | 0V |
| Arduino uno | 7 | 8 | 2 | 3 | 6 | 5 | + 5V | + 5V | GND |
Par exemple, nous connecterons un seul moteur selon ce schéma. Nous utilisons les sorties des pilotes In3, In4 et En2. Le diagramme schématique de la connexion se présente comme suit:

Disposition de l'apparence

5. Le programme
Nous allons écrire un programme simple qui fera tourner le moteur, en changeant de direction à chaque seconde.
Const int in3 \u003d 2; const int in4 \u003d 3; const int en2 \u003d 5; void setup () (pinMode (in3, OUTPUT); pinMode (in4, OUTPUT); pinMode (en2, OUTPUT); analogWrite (en2, 255);) void loop () (digitalWrite (in3, LOW); digitalWrite (in4, HIGH); délai (1000); digitalWrite (in3, HIGH); digitalWrite (in4, LOW); delay (1000);)
Fonction analogWrite À l'aide d'un signal PWM, il contrôle la puissance du moteur. Dans ce programme, nous demandons au conducteur de faire tourner le moteur à la vitesse maximale, ce qui correspond à un signal PWM - 255. Il convient de noter ici que la réduction de moitié du signal PWM ne donnera pas la moitié de la vitesse. La vitesse et la traction des moteurs à courant continu ne dépendent pas linéairement de la tension d'entrée.
Maintenant, compliquons le programme. En plus de la direction, nous allons également changer la puissance.
Const int in3 \u003d 2; const int in4 \u003d 3; const int en2 \u003d 5; void setup () (pinMode (in3, OUTPUT); pinMode (in4, OUTPUT); pinMode (en2, OUTPUT);) void loop () (digitalWrite (in3, HIGH); digitalWrite (in4, LOW); analogWrite (en2, 150); retard (2000); analogWrite (en2255); delay (2000); digitalWrite (in3, LOW); digitalWrite (in4, HIGH); analogWrite (en2,150); delay (2000); analogWrite (en2, 255); retard (2000);)
Voici le résultat. Tout d'abord, le moteur tourne à basse vitesse, puis atteint sa vitesse maximale et répète tout dans le sens opposé. Dans la vidéo, nous faisons tourner un moteur CC CH1 commun avec une roue. Ceux-ci sont souvent utilisés dans la formation de robots.
Missions
Maintenant qu'il est devenu un peu plus clair de contrôler les moteurs à courant continu conventionnels, nous allons essayer de réaliser plusieurs tâches basées sur le robot à deux roues le plus simple.
- Assemblez un pilote basé sur un transistor NPN et faites tourner le moteur avec.
- Pilotez deux moteurs à la fois en utilisant le L293D, en leur transmettant une puissance différente.
- Assemblez un robot à roues et faites-le bouger en cercle.
- Faites bouger le robot à roues en spirale.
Dans la prochaine leçon sur le thème des moteurs, nous étudierons le travail des encodeurs, ce qui rendra le contrôle plus précis et aidera à fabriquer un servo vous-même.

