Classification des moteurs.Propriétés du moteur courant continu comment les générateurs sont principalement déterminés par la façon dont l'enroulement de champ est alimenté. À cet égard, distinguer les moteurs à excitation parallèle, indépendante, séquentielle et mixte. Les circuits de commutation du moteur diffèrent des circuits de commutation des générateurs respectifs uniquement en présence d'un rhéostat de démarrage, qui est introduit pour limiter le courant au démarrage.
Réversibilité d'une machine électrique.Une machine à courant continu à excitation indépendante ou parallèle connectée à un réseau à tension constante peut fonctionner à la fois en mode générateur et moteur et peut passer d'un mode de fonctionnement à un autre.
Pour le circuit "enroulement d'induit - réseau", selon la deuxième loi de Kirchhoff,
E - U = IaΣ Ra,
D'où
Jemais = (E - U)/Σ Rmais. |
Si E > Ualors en cours Jeet coïncide avec EMF Eet la machine fonctionne en mode générateur (Fig. 8.58, a). Dans ce cas, le moment électromagnétique M opposé au sens de rotation n, c'est-à-dire qu'il est inhibiteur. L'équation (8.79) pour le mode générateur a la forme
U \u003d E - Ia Σ Ra.
Si E < Ualors en cours Jeet dans l'équation (8.79) change de signe et est dirigé contre les CEM E. Conformément à cela change le signe et le moment électromagnétique M, c'est-à-dire qu'il agit dans le sens de rotation n. Dans ce cas, la machine fonctionne en mode moteur (Fig. 8.58, b) et l'équation (8.79) prend la forme
| U \u003d E + IaΣ Ra, |
Si pour une direction de courant positive Jeet pour le mode moteur, prenez sa direction, qui est opposée à l'EMF E.
Ainsi, des générateurs à excitation indépendante et parallèle connectés à un réseau de tension Upasser automatiquement en mode moteur si leur EMF E moins de tension secteur U. Ces moteurs passent automatiquement en mode générateur lorsque leur emf E plus U. (8.83) (8.84)
Lorsque la machine DC est en mode moteur EMF E et couple M sont déterminés par les mêmes formules qu'en mode générateur:
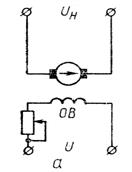
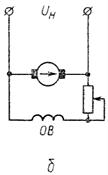
Le moteur à excitation parallèle. Dans ce moteur (Fig. 8.59, a) l'enroulement de champ est connecté en parallèle avec l'enroulement d'induit au réseau. Un rhéostat de réglage est inclus dans le circuit d'enroulement de champ. RV., et dans la chaîne de l'armature - rhéostat de départ Rn. Une caractéristique du moteur est que son courant d'excitation Jeen ne dépend pas du courant de l'armature Jea (courant de charge), car l'alimentation électrique de l'enroulement inducteur est essentiellement indépendante. Par conséquent, en négligeant l'effet démagnétisant de la réaction d'induit, nous pouvons approximativement supposer que le flux moteur ne dépend pas de la charge. Dans cette condition, selon (8.84) et (8.85), on obtient que les dépendances M \u003d f (Ia) et n \u003d f (Ia) (caractéristiques de moment et de vitesse) linéaire (Fig. 8.59, b). Par conséquent, les caractéristiques linéaires et mécaniques du moteur n \u003d f (M) (Fig. 8.60, a).
Si une résistance supplémentaire ou un rhéostat est inclus dans le circuit d'induit Rn alors
n= [U - Ia(Σ Rmais + Rn)] / ( seF) \u003d n0 - Δ n,
où n0 = U/(avecе Ф) - vitesse de ralenti; Δп \u003d (ΣRа + Rn ) Ia / (ce F) - une diminution de fréquence due à la chute de tension totale dans toutes les résistances incluses dans le circuit d'induit moteur.La valeur Δp, en fonction de la somme des résistances Σ Ra + Rn, détermine la pente de la vitesse n \u003d f (Ia) et mécanique n \u003d f (M) caractéristiques à l'axe des abscisses. En l'absence de résistance supplémentaire dans la chaîne Rn les caractéristiques spécifiées sont dures (caractéristiques naturelles 1 sur la fig. 8.59, b et 8.60, mais), puisque la chute de tension Ia ΣRa dans les enroulements de la machine, inclus dans le circuit d'induit, à une charge nominale de seulement 3 à 5% de Unom. Lorsqu'un rhéostat supplémentaire est activé, l'angle d'inclinaison de ces caractéristiques augmente, ce qui entraîne la formation d'une famille de caractéristiques rhéostatiques 2, 3, 4 correspondant à différentes résistances du rhéostat Rpl. Rn2 et Rp3. Une plus grande résistance Rn, plus l'angle d'inclinaison est grand, plus la caractéristique rhéostatique est forte.
La réaction de l'armature, réduisant le débit de la machine Ф quelque peu sous charge, cherche à donner à la caractéristique mécanique naturelle un angle d'inclinaison négatif auquel la fréquence de rotation n augmente avec l'augmentation du moment M. Cependant, un moteur avec cette caractéristique dans la plupart des entraînements électriques ne peut pas fonctionner de manière stable. Par conséquent, les moteurs modernes de grande et moyenne puissance à excitation parallèle ont souvent un petit enroulement de champ séquentiel, ce qui donne à la caractéristique mécanique la pente nécessaire. MDS de cet enroulement au courant Jenom représente environ 10% du MDS de l'enroulement parallèle.
Réglage du rhéostat Rp.v vous permet de modifier le courant d'excitation du moteur Jeet son flux magnétique F. Comme suit de (8.86), la fréquence de rotation change également n. Les disjoncteurs et les fusibles ne sont pas installés dans le circuit d'enroulement de champ, car lorsque ce circuit se brise et une petite charge sur l'arbre, le régime du moteur augmente (le moteur passe en "espacement"). Cela augmente considérablement le courant de l'armature et peut provoquer un incendie circulaire.
Les performances du moteur en question (Fig. 8.60, b) sont les dépendances de la consommation d'énergie P1 courant Ia ≈ In vitesses de rotation nmoment M et efficacité η de la puissance donnée P2 sur l'arbre moteur à U \u003d const et Jein \u003d const. CARACTÉRISTIQUES n \u003d f (P2) et M \u003d f (P2) sont linéaires et les dépendances P1 \u003d f (P2), Ia \u003d f (P2) et η \u003d f (P2) avoir un caractère commun à toutes les machines électriques. Parfois, les performances sont construites en fonction du courant d'induit Jea.
Si dans le moteur, l'enroulement d'induit et l'enroulement de champ sont connectés à des sources d'alimentation avec des tensions différentes, alors on l'appelle un moteur d'excitation indépendant. De tels moteurs sont utilisés dans des entraînements électriques dans lesquels l'enroulement d'induit est alimenté par un générateur ou un convertisseur à semi-conducteur. Les caractéristiques mécaniques et de performance d'un moteur à excitation indépendante sont similaires à celles d'un moteur à excitation parallèle, car elles ont un courant d'excitation Jene dépend pas non plus du courant d'induit Jea.
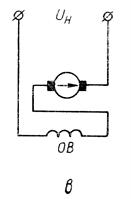
Moteur d'excitation série. Dans ce moteur (Fig. 8.61, a) le courant d'excitation Iв \u003d Ia, par conséquent, le flux magnétique Φ est fonction du courant d'induit Jea. La nature de cette fonction varie en fonction de la charge du moteur. À Jea Inom, lorsque le système magnétique de la machine n'est pas saturé, Ф \u003d kф Ia en outre, le coefficient de proportionnalité kf dans une gamme importante de charges reste presque constante. Avec une nouvelle augmentation du courant d'induit, le flux Φ augmente plus lentement que Je \u003e Inom) on peut supposer que Φ ≈ const. Conformément à ce changement en fonction n \u003d f (Ia) et M \u003d f (Ia).
À Ia nom caractéristique de régime moteur n \u003d f (Ia) (Fig. 8.61, b) a la forme d'une hyperbole, car la fréquence de rotation
| n \u003d | U - Ia ∑Ra | = | U | - | Ia ∑Ra | \u003d C1 | U | - C2. |
| ce f | ce kf Ia | ce kf Ia | Ia |
O Where C1 et C2 - constant.
À Jea\u003e Jela caractéristique de vitesse de M. devient linéaire, car la vitesse
| n \u003d | U - Ia ∑Ra | = | U | - | Ia ∑Ra | \u003d C "1 U - C" 2 Ia |
| ce f | ce f | ce f |
O Where Avec"1 et Avec"2 - constantes.
De même, nous pouvons obtenir la dépendance du moment électromagnétique sur le courant d'induit M \u003d f (Ia). À Ia caractéristique du moment nom M \u003d f (Ia) a la forme d'une parabole. (Fig. 8.61, b), puisque le moment électromagnétique
M= cMF Í un \u003d cm kf Ia2= C3 Ia2 ,
O Where Avec3 - constant.
À Jea\u003e Jem. moment caractéristique linéaire, puisque
M= cMF Ia= C "3 Ia,
O Where C "3 - constant. Caractéristiques mécaniques n \u003d f (M) (Fig. 8.62, mais) peut être construit sur la base de dépendances n \u003d f (Ia) et M \u003d f (Ia). À La vitesse de rotation Ia nom varie selon la loi
| n = | U | - | ∑Ra | = C4 | U | - C2, |
| ce kf √ M / (cm kf) | ce kf | √M |
O Where C4 - constant.
À Jea\u003e Jemr. addiction n \u003d f (M) devient linéaire.
Inclus dans la chaîne d'ancres de départ rhéostats avec résistances Rn1, Rn2 et Rn3 En plus de la caractéristique naturelle 1, une famille de caractéristiques rhéostatiques peut être obtenue 2, 3 et 4 , et plus Rn, la plus faible est la caractéristique.
Les performances d'un moteur à excitation séquentielle sont illustrées à la Fig. 8.62, b. Dépendances n \u003d f (P2) M \u003d f (P2) sont non linéaires; addictions P1 \u003d f (P2), Ia \u003d f (P2) et η \u003d f (P2) ont approximativement le même caractère que le moteur à excitation parallèle.
De la considération de la fig. 8.62, et il s'ensuit que les caractéristiques mécaniques du moteur en question (naturelles et rhéostatiques) sont molles et ont un caractère hyperbolique. A faibles charges, la vitesse de rotation augmente fortement et peut dépasser la valeur maximale autorisée (le moteur passe en «espacement»). Par conséquent, de tels moteurs ne peuvent pas être utilisés pour entraîner des mécanismes fonctionnant en mode ralenti ou à faible charge (diverses machines, convoyeurs, etc.). Habituellement, la charge minimale autorisée est (0,2 ÷ 0,25) Jenom; seuls les moteurs de faible puissance (dizaines de watts) sont utilisés pour fonctionner dans des appareils où le ralenti est possible. Pour empêcher le moteur de tourner sans charge, il est relié au mécanisme d'entraînement de manière rigide (par transmission à engrenages ou accouplement aveugle); l'utilisation d'un entraînement par courroie ou d'un embrayage à friction pour l'engagement est inacceptable.
Malgré cet inconvénient, les moteurs à excitation séquentielle sont largement utilisés dans divers entraînements électriques, en particulier là où il y a une grande variation du couple de charge et des conditions de démarrage difficiles (mécanismes de levage et de rotation, entraînement par traction, etc.). En effet, la caractéristique douce du moteur en question est plus favorable aux conditions de fonctionnement spécifiées que la caractéristique dure du moteur à excitation parallèle. Avec une caractéristique rigide, la vitesse de rotation n est presque indépendante du moment Mdonc puissance
P2 = Mω \u003d 2π nM/60 = Avec5 M,
O Where C5- constant.
Avec une caractéristique douce d'un moteur excité séquentiellement, la vitesse est inversement proportionnelle à √Mdonc
P2 = Mω \u003d 2π nM/60 = C "5 √M,
O Where C5 - constant.
Par conséquent, lorsque le moment de charge change sur une large plage, la puissance P2et donc le pouvoir P1 et actuel Ia pour les moteurs à excitation séquentielle varient dans une moindre mesure que pour les moteurs à excitation parallèle; en outre, ils tolèrent mieux les surcharges. Par exemple, pour un rapport de surcharge de moment donné M / Mnom \u003d km le courant d'induit dans le moteur avec une excitation parallèle augmente km fois, et dans un moteur à excitation séquentielle - uniquement √km fois. Par conséquent, un moteur à excitation séquentielle développe un couple de démarrage plus élevé, car pour une multiplicité donnée du courant de démarrage Jen / Jenom \u003d ki son moment de départ Mn \u003d ki 2 Mnom, et le moteur à excitation parallèle Mn \u003d ki Mnom.
Les avantages indiqués des moteurs d'excitation séquentielle se manifestent le plus clairement dans les entraînements simples qui n'ont pas de systèmes de contrôle automatique. En présence de tels systèmes, la préférence est toujours donnée aux moteurs à excitation parallèle ou indépendante, у. qui, en utilisant les régulateurs de courant d'excitation, il est possible d'obtenir la forme requise d'une caractéristique mécanique, par exemple hyperbolique.
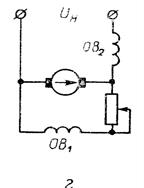
Un moteur d'excitation mixte. Dans ce moteur (Fig. 8.63, a), le flux magnétique Φ est créé à la suite de l'action combinée de deux enroulements de champ - parallèle et série. Par conséquent, ses caractéristiques mécaniques (Fig. 8.63, b, les courbes 3 et 4) sont situées entre les caractéristiques des moteurs à parallèle (droit 1 ) et séquentiel (courbe 2 ) l'excitation. En fonction du rapport du MDS des enroulements parallèles et en série à
mode nominal, vous pouvez apporter les caractéristiques du moteur d'excitation mixte à la caractéristique 1 (avec un petit enroulement série MDS) ou à la caractéristique 2 (avec un petit enroulement parallèle MDS). Un des avantages d'un moteur à excitation mixte est que, ayant une caractéristique mécanique douce, il peut fonctionner au ralenti, car sa vitesse de rotation n0 a un sens final.Les caractéristiques de performance du DPT d'excitation parallèle de faible puissance sont représentées sur la Fig. 5.8.
Les données de performances du moteur sont les dépendances de la vitesse de rotation n, de la consommation de courant I et de la puissance P 1, du moment sur l'arbre du moteur M, du rendement η sur la puissance nette P 2 avec une valeur constante de la tension d'alimentation U n \u003d const, du courant de champ I v \u003d const et l'absence de résistance supplémentaire dans chaîne d'ancre R d i \u003d 0. Ils permettent de juger des propriétés opérationnelles des moteurs et de déterminer leurs conditions de fonctionnement les plus économiques en conditions de production.
Caractéristiques mécaniques d'un moteur à courant continu
Les caractéristiques mécaniques du moteur sont appelées la dépendance de la vitesse en régime permanent sur le moment de l'arbre du moteur - n \u003d f 1 (M) ou ω \u003d f 2 (M).
Les caractéristiques sont dites naturelles si elles sont obtenues dans des conditions de puissance nominale (à tension nominale), d'excitation nominale et en l'absence de résistance supplémentaire dans le circuit d'induit.
Les caractéristiques du moteur sont dites artificielles lorsque l'un des facteurs ci-dessus change.
Nous substituons dans l'équation  , expressions pour déterminer le DPT actuel et EMF
, expressions pour déterminer le DPT actuel et EMF
E i \u003d C E nF,
La caractéristique mécanique d'un moteur à courant continu à excitation indépendante et parallèle a la forme:
 ,
,
où R yats \u003d R i + R add - la résistance totale du circuit d'induit, Ohm;
R I - résistance d'enroulement d'induit, Ohm;
R add - résistance supplémentaire dans le circuit d'induit, Ohm.
En analysant l'expression pour construire la caractéristique mécanique, nous voyons que mathématiquement ce sont des équations d'une ligne droite coupant l'axe de vitesse au point n 0, où
n 0 \u003d U / ( ![]() · Ф) - vitesse de ralenti.
· Ф) - vitesse de ralenti.
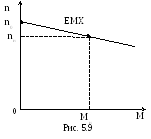
La caractéristique mécanique naturelle est représentée sur la fig. 5.9.
Pour construire une caractéristique mécanique naturelle (EMX), deux points doivent être trouvés.
L'un d'eux est déterminé à partir des données du passeport du moteur pour les valeurs nominales de n n et M n:
M n \u003d P n / ω n, ω n \u003d πn n / 30 \u003d 0,105 n n,
où P n - puissance nominale du moteur, W;
ω n - vitesse nominale, rad / sec.
Le deuxième point correspond à un ralenti idéal lorsque I \u003d 0 et M \u003d 0.
Le régime de ralenti peut être trouvé à partir de l'équation suivante lors du remplacement des données de la plaque signalétique du moteur:
 .
.
Contrôle de vitesse Dpt
Il existe trois façons principales de réguler la vitesse des machines à courant continu: la régulation rhéostatique, la régulation en changeant le flux magnétique, la régulation en changeant la tension du réseau.
Régulation rhéostatique les vitesses de rotation sont réalisées en introduisant des résistances actives supplémentaires - résistances R yats \u003d (R i + R add) \u003d var pour U \u003d U n, Ф \u003d Ф н. Comme le montre l'équation de la caractéristique mécanique 
lorsque la valeur de la résistance supplémentaire R ajoutée dans la chaîne d'induit change, le régime de ralenti idéal n 0 reste constant, seule la rigidité de la caractéristique change.
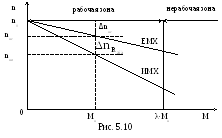 Les caractéristiques mécaniques artificielles (IMX) lors de l'introduction d'une résistance supplémentaire dans le circuit du rotor d'un moteur à courant continu d'excitation indépendante sont illustrées à la Fig. 5.10.
Les caractéristiques mécaniques artificielles (IMX) lors de l'introduction d'une résistance supplémentaire dans le circuit du rotor d'un moteur à courant continu d'excitation indépendante sont illustrées à la Fig. 5.10.
Contrôle de vitesse lors du changement de flux magnétique Elle est réalisée principalement en raison de l'affaiblissement du flux magnétique Ф de l'excitation du moteur, c'est-à-dire en réduisant le courant d'excitation i in.
Avec une diminution du flux magnétique, les conditions suivantes sont généralement remplies: U \u003d U n; R дя \u003d 0. Dans ce cas, pour la vitesse de ralenti idéale, nous avons
 alors
alors  ,
,
où  - vitesse de ralenti pour les caractéristiques mécaniques artificielles;
- vitesse de ralenti pour les caractéristiques mécaniques artificielles;
 - régime de ralenti pour une caractéristique mécanique naturelle.
- régime de ralenti pour une caractéristique mécanique naturelle.
Les caractéristiques mécaniques artificielles avec une diminution du flux magnétique sont présentées dans la Fig. 5.11.
D  pour contrôler la vitesse d'un moteur à courant continu indépendant excitation changement de tension d'alimentation Des sources de tension réglables sont nécessaires.
pour contrôler la vitesse d'un moteur à courant continu indépendant excitation changement de tension d'alimentation Des sources de tension réglables sont nécessaires.
D'après l'équation des caractéristiques mécaniques, on voit que la régulation de tension est associée à un changement du régime de ralenti idéal n 0 \u003d U n / (  · F n) tout en conservant la rigidité des caractéristiques. Cela vous permet d'élargir considérablement la gamme de régulation. La régulation de la vitesse descend généralement de la caractéristique principale. changement (diminution) de la tension ressemblera à des lignes droites. Les caractéristiques mécaniques d'un moteur à courant continu d'excitation indépendant avec une variation de la tension d'alimentation sont illustrées à la Fig. 5.12.
· F n) tout en conservant la rigidité des caractéristiques. Cela vous permet d'élargir considérablement la gamme de régulation. La régulation de la vitesse descend généralement de la caractéristique principale. changement (diminution) de la tension ressemblera à des lignes droites. Les caractéristiques mécaniques d'un moteur à courant continu d'excitation indépendant avec une variation de la tension d'alimentation sont illustrées à la Fig. 5.12.
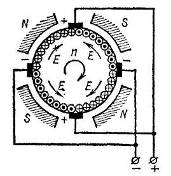
Moteur à courant continu - une machine électrique, une machine à courant continu qui convertit l'énergie électrique à courant continu en énergie mécanique. Le moteur le plus simple se compose d'un stator, d'un rotor et d'un ensemble brosse-collecteur. Fig.1a
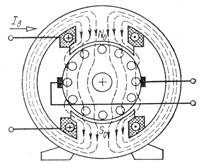
Fig.1a
Sur le stator du DPT se trouvent des électro-aimants avec enroulements de champ - bobines induisant un flux de champ magnétique
Le rotor est composé d'électroaimants à polarité commutable et d'un capteur de position du rotor et d'un interrupteur (collecteur).
Les résultats de toutes les bobines de rotor sont combinés en un ensemble collecteur. L'ensemble collecteur est généralement un anneau de plaques de contact isolées (lamelles) situées le long de l'axe du rotor. Le collecteur (brosse-collecteur) remplit deux fonctions à la fois - il s'agit d'un capteur de position angulaire du rotor et d'un interrupteur de courant à contacts coulissants. Un balai est nécessaire pour fournir de l'électricité aux bobines d'un rotor rotatif et pour commuter le courant dans les enroulements du rotor. Brosse - contact fixe (généralement graphite ou cuivre-graphite). Les machines à courant continu sont généralement rendues multipolaires, tandis que dans chaque section de l'enroulement pendant une révolution, la valeur et le signe de l'EMF changent autant de fois qu'il y a de pôles. Le circuit magnétique d'une telle machine est plus complexe, alors que le nombre de paires de balais est égal au nombre de paires de pôles, et des balais de même polarité sont connectés entre eux.
Les moteurs à courant continu sont généralement classés
Par la méthode d'activation des enroulements d'excitation des électroaimants du stator par rapport à l'enroulement du rotor. Fig.1b.Excitation en série - les enroulements du stator sont connectés en série avec l'enroulement du rotor. Excitation parallèle - les enroulements du stator sont connectés en parallèle avec l'enroulement du rotor. Excitation mixte - lorsque les enroulements d'excitation sont divisés en deux parties, l'une est activée en série, l'autre parallèlement à l'enroulement du rotor. Excitation indépendante - les enroulements du stator sont alimentés par une source distincte d'excitateur à courant continu. Le type de connexion des enroulements de champ affecte de manière significative la traction et les caractéristiques électriques du moteur électrique.
Caractéristiques DPT
Caractéristique mécanique Le DPT est la dépendance de la vitesse du rotor du moteur sur le moment de l'arbre du DPT. Il est affiché sous forme de graphique. L'axe horizontal (abscisse) est le moment sur l'arbre du rotor et l'axe vertical (ordonnée) est la vitesse du rotor. La caractéristique mécanique du DPT est une ligne avec une pente négative.
La caractéristique mécanique du DPT est construite à une certaine tension des enroulements du rotor. Dans le cas de la construction des caractéristiques pour plusieurs valeurs de la tension d'alimentation, ils parlent de la famille des caractéristiques mécaniques du DCT.
Ajustement de la caractéristique Le DPT est la dépendance de la vitesse du rotor sur la tension d'alimentation des enroulements du rotor du DPT. Il est affiché sous forme de graphique. L'axe horizontal (abscisse) est la tension d'alimentation des enroulements du rotor, l'axe vertical (ordonnée) est la vitesse du rotor. La caractéristique de réglage du DPT est une ligne avec une pente positive.
La caractéristique de réglage du DPT est construite à un certain moment développé par le moteur. Dans le cas de la construction des caractéristiques de réglage pour plusieurs valeurs du moment sur l'arbre du rotor, on parle d'une famille de caractéristiques de réglage du DCT.
Gestion DPT. Le moteur est contrôlé par le courant dans l'enroulement du rotor du moteur, qui est proportionnel à la tension appliquée à cet enroulement. La réaction du moteur à une tension donnée à un certain moment extérieur est visible sur la caractéristique de réglage correspondante. La caractéristique de commande indique la vitesse que le moteur atteindra en régime permanent. Les principales formules utilisées dans la gestion du DPT:
M \u003d k m I - le moment développé par le moteur est proportionnel au courant dans l'enroulement de l'induit (rotor). k m - coefficient de couple moteur.
E \u003d k eω - contre-EMF dans les enroulements d'induit proportionnellement à la fréquence angulaire de rotation du rotor. k e - coefficient emf moteur.
U \u003d Ri - Loi d'Ohm pour l'enroulement du rotor. R est la résistance de l'enroulement du rotor, I est le courant qu'il contient et U est la tension fournie à l'enroulement du rotor.
La régulation de la vitesse est la modification forcée délibérée de la vitesse du moteur au moyen d'un dispositif ou d'un dispositif spécial, quelles que soient la taille et la nature de la charge, conformément aux exigences de la loi de mouvement du corps de travail du mécanisme. La vitesse réglée lors de la régulation, lorsqu'il n'y a pas d'effet sur le dispositif de commande, change ensuite en fonction des caractéristiques mécaniques de l'entraînement électrique en fonction de la charge. La régulation de la vitesse permet l'utilisation la plus rationnelle des mécanismes de production, pour garantir des modes de fonctionnement optimaux et, en règle générale, réduire la consommation d'énergie. Expression de la vitesse de rotation d'un moteur à courant continu:
montre qu'il existe trois façons fondamentalement différentes de contrôler la vitesse angulaire du moteur:
1) une variation du courant d'excitation (flux magnétique) du moteur;
2) une modification de la résistance du circuit d'induit à travers des résistances (rhéostatiques);
3) un changement de la tension fournie à l'induit du moteur.
Actuellement, les machines à courant continu sont largement utilisées dans les entraînements électriques à vitesse ou à couple contrôlé. Ils sont fabriqués à partir de fractions de watt jusqu'à 12 MW. Leur tension nominale ne dépasse pas 1500 V et parfois seulement dans les grandes machines atteint 3000 V. La fréquence de rotation varie considérablement - de plusieurs tours à plusieurs milliers de tours par minute.
Les plus utilisées sont les machines à courant continu à collecteur-collecteur mécanique. Bien que cela complique les conditions de travail, une machine DC correctement conçue et de haute qualité est assez fiable. Les machines à courant continu, comme toutes les machines électriques, sont réversibles, c'est-à-dire qu'elles peuvent fonctionner à la fois comme générateurs et moteurs. Structurellement, ils sont identiques. Cependant, afin d'obtenir des modes de fonctionnement plus économiques, les générateurs et les moteurs électriques sont conçus et fabriqués séparément. En particulier, ils sont fabriqués pour différentes tensions: générateurs - pour 115, 230, 460 V, moteurs - pour 110, 220, 440 V.
Les générateurs CC sont utilisés comme excitateurs de machines synchrones, générateurs de soudage, pour alimenter des bains galvaniques et des moteurs CC, et pour charger des batteries.
Les moteurs à courant continu sont utilisés pour la traction électrique, dans les installations de grue, la métallurgie, l'industrie du papier et d'autres industries où une régulation douce et précise de la vitesse et du couple dans de larges limites est requise.
Moteurs électriques à courant continu. Spécifications techniques
La série principale de machines à courant continu à usage général fabriquées dans la CEI est la série 2P. Il couvre une plage de puissance de 0,37 à 200 kW avec une hauteur d'axe de rotation de 90 à 315 mm. Les moteurs électriques de cette série sont conçus pour les entraînements électriques à large réglage. Ils remplacent les machines de la série P, ainsi que les machines spécialisées des séries PS (T), PBS (T), PR. Voici la structure du symbole d'une machine DC de la série 2P:
2P / 1 X / 2 X / 3 X / 4 X / 5 X / 6,
où 1 est le nom de la série (2P); 2 - version selon la méthode de protection et de ventilation: Ф - version protégée avec ventilation indépendante d'un ventilateur externe, B - version fermée avec refroidissement naturel, O - version fermée avec soufflage externe du ventilateur; 3 - la hauteur de l'axe de rotation, mm; 4 - symbole de la longueur du noyau de l'ancre: M - moyen, L - grand; 5 - la lettre F en présence d'un tachogénérateur intégré (en l'absence de tachygénérateur, la lettre G n'est pas réglée); 6 - modification climatique et catégorie de placement.
Les moteurs électriques d'une série 2P sont fabriqués avec un nombre complet de pôles supplémentaires. Dans ce cas, les moteurs avec une hauteur de l'axe de rotation de 90 et 100 mm sont bipolaires, 112 mm sont tétrapolaires.
Les moteurs des types 2PN, 2PF ont un degré de protection IP22, et les types 2PB et 2PO - IP44. Les moteurs avec degré de protection IP22 ont un ventilateur centrifuge réversible monté sur l'arbre d'armature du côté opposé au collecteur.
Les moteurs avec un degré de protection IP44 ont un ventilateur centrifuge externe, qui est monté sur l'extrémité de l'arbre en face de l'entraînement et est fermé avec un boîtier estampé ou soudé en tôle d'acier d'une épaisseur de 1-2 mm. À l'intérieur de ces moteurs, du côté opposé au collecteur, se trouve un ventilateur d'agitateur.
Pour entraîner le ventilateur dans les moteurs de type 2PF et 2PO, un moteur asynchrone de type 4AA56A4UZ avec une vitesse synchrone de 1500 tr / min est utilisé.
Dans les moteurs avec une hauteur d'axe de rotation de 90 à 200 mm, le lit est fait de morceaux de tuyaux sans soudure, et avec une hauteur d'axe de rotation de 225 à 315 mm, les lits sont soudés à partir de plaques laminées.
La connexion des moteurs de la série 2P avec un entraînement est effectuée par un entraînement élastique, à engrenage ou à courroie trapézoïdale. L'extrémité de travail de l'arbre est du côté opposé au collecteur.
Les moteurs sont fabriqués avec une excitation indépendante. La tension d'excitation est de 110 ou 220 V, quelle que soit la tension nominale de l'armature.
Le mode de fonctionnement de la machine de la série 2P est long (S1), la durée de vie moyenne est de 12 ans, la durée de vie moyenne est de 30 000 heures.
Les moteurs de type 2P ... G sont fabriqués avec un générateur tachymétrique de type TC1, qui a une conception intégrée fermée. Excitation d'un tachogénérateur à partir d'aimants permanents.
La tension nominale du circuit d'ancrage de la machine de la série 2P est de 110, 220, 240 et 660V.
Les machines de la nouvelle série 4P par rapport à la série 2P se caractérisent par des dimensions hors tout améliorées. Toutes les machines de cette série ont un enroulement de compensation distribué, et les noyaux magnétiques statoriques (noyaux) et l'armature sont chargés.
Dans un certain nombre de machines de la série 4P (par exemple, types 4PO, 4PB), les stators sont fabriqués en fonction du type de stators moteurs asynchrones et n'ont pas de pôles explicites. L'enroulement de champ est disposé dans 2 rainures à l'intérieur de l'arc polaire, l'enroulement de compensation est placé uniformément dans toutes les rainures restantes de l'alésage du stator.
Les moteurs des types 4PO, 4PB ont un degré de protection IP44. Ils sont conçus pour un fonctionnement continu (S1), mais peuvent fonctionner en modes S3 - S8, et sont fabriqués avec une excitation parallèle ou indépendante de 220V.
Les moteurs électriques largement réglables de type 4PF ont un degré de protection IP23. Ils sont livrés avec un générateur tachymétrique de type TP80-20-0.23 et un capteur de protection thermique. Excitation indépendante de la tension 110 et 220V.
Les moteurs du type 4PF ont un stator de section octogonale, qui est assemblé à partir de tôles d'acier électrique de 0,5 mm d'épaisseur. Il est pressé entre deux plaques de pression de 10 mm d'épaisseur en acier laminé. Dans la direction axiale, le boîtier du stator est tiré avec des goujons et soudé aux coins le long des plaques de brassage, ce qui assure une rigidité latérale. Des trous filetés sont réalisés dans les plaques de pression pour les boulons de fixation des boucliers de roulement.
Les enroulements du stator sont bobinés par machine.
Des canaux axiaux sont prévus pour la ventilation dans le stator. Boucliers de roulement - fonte, fonte. Les pattes sont faites sur les boucliers de roulement. Porte-balais - conception unifiée radiale.
Les moteurs électriques sont exécutés avec des roulements de classe de précision 6.
Pour les mécanismes fonctionnant dans des conditions difficiles (machines à couper les métaux, production métallurgique), les gros moteurs électriques de la série 4P sont fabriqués avec une hauteur de l'axe de rotation de 350 et 450 mm.
Dans la désignation de ces moteurs, après la série (4P), la hauteur de l'axe de rotation, le nombre de balais sur le collecteur, la puissance à la tension principale, la version climatique (U ou T), et la catégorie de placement sont successivement indiqués.
Les moteurs peuvent être fabriqués pour les tensions 440, 660, 750, 930 V. L'excitation est indépendante (tension 220 V). Le mode de fonctionnement principal est continu (S1), mais le fonctionnement dans les modes S3 - S8 est autorisé. Les moteurs sont fabriqués avec un tachymétrique à courant continu et un relais de vitesse. Ventilation forcée par un ventilateur séparé. Degré de protection IP44.
Les moteurs électriques PG de la série PG (PGT) sont fabriqués avec un ancrage lisse et sont conçus pour fonctionner dans les entraînements électriques de suivi à grande vitesse et les entraînements électriques à large réglage des machines de découpe des métaux et autres machines de travail lorsqu'ils sont alimentés par des sources de courant continu et des convertisseurs à semi-conducteurs. Le moteur électrique peut être équipé d'un générateur tachymétrique de type TC-IM (série PGT). Le mode de fonctionnement est continu (S1).
La légende indique en série: série (PG), la lettre T - en présence d'un tachygénérateur intégré, puissance, M - modernisé, modification climatique, catégorie d'hébergement.
Les moteurs sont fabriqués dans une conception protégée, l'air est soufflé par un fan-rider, qui est entraîné par un moteur à induction.
Les moteurs de la série EP sont conçus pour fonctionner dans des entraînements électriques à réglage large de machines de découpe de métal de haute précision et d'installations spéciales. Dans le symbole après les lettres du champ électrique, il est indiqué: au numérateur - tension nominale, et au dénominateur - puissance (conditionnellement). Mode de fonctionnement nominal S1.
Pour les laminoirs, les pelles araignées, les treuils de mine, les rameurs et les bancs d'essai, des machines à courant continu de haute puissance des séries P2 et MP sont conçues. Leur puissance est de 3150 - 12 500 kW à une vitesse de 36-800 tr / min, tension - 440, 750, 930 V.
Pour alimenter les puissants moteurs à courant continu des entraînements principaux des laminoirs, les générateurs de la série GP sont utilisés.
Il existe une série de machines à courant continu à usage spécial: grue, métallurgie, traction, micromachines de systèmes d'automatisation.
Les moteurs de la série D sont conçus pour des grues spécialisées, des mécanismes métallurgiques auxiliaires à fonctionnement intermittent, un grand nombre de démarrages, une large gamme de contrôle de vitesse. Lors de la régulation des moteurs, la tension peut augmenter à 440 V par rapport à la tension nominale de 220 V. La vitesse moyenne d'exécution à basse vitesse est de 700; haute vitesse - 1200 tr / min. Pour les moteurs à basse vitesse, le nombre de démarrages par heure autorisé est de 2000, pour les moteurs à grande vitesse - 300. La classe de résistance à la chaleur de l'isolation des enroulements et du collecteur est N (température supérieure à 120 ° C).
La conception principale des moteurs est fermée avec un degré de protection IP21. Les moteurs des séries D810 - D818 ont un lit amovible. Les deux extrémités de l'arbre du moteur sont les mêmes et peuvent transmettre le couple à travers l'engrenage, sont faites pour une puissance de 2,5 à 185 kW. Pour les locomotives diesel, les générateurs CC de la série GP sont produits pour une puissance de 700 à 2000 kW, une tension de 310 à 810 V, une vitesse de rotation de 900 à 4220 tr / min et sont conçus pour alimenter les moteurs de traction. Le lit du générateur est cylindrique avec des pieds de support sur les côtés. Les pôles principaux sont doublés, sur eux se trouvent les enroulements d'une excitation indépendante et séquentielle (pour le démarrage d'un moteur diesel). Les poteaux supplémentaires sont en acier massif.
En tant que moteurs électriques de traction de locomotives diesel, des machines d'excitation séquentielle de la série ED sont utilisées, qui sont fabriquées pour une puissance de 230-411 kW, une tension de 381-700 V et une fréquence de rotation de 585-3050 tr / min. Les moteurs ont une ventilation indépendante et des performances protégées.
Pour les locomotives électriques, des moteurs électriques de traction des séries TL (670kW, 1500 V), NB (575 - 790kW, 950 - 1100V), DT (465 kW, 1500 V) sont produits.
Sur les véhicules électrifiés urbains, des moteurs de traction DC DC sont utilisés. Ils sont fabriqués avec un degré de protection IP20, avec auto-ventilation, l'air est fourni par le collecteur. La série DK se caractérise par une puissance de 45 - 185 kW, une tension de 275 - 750 V, une vitesse moyenne de 1500 tr / min. Pour faciliter la maintenance, les moteurs électriques de tramway n'ont que deux doigts de porte-balais, qui sont situés dans la partie inférieure du lit.
Les moteurs à courant continu de la série DK (230 - 560 kW, 550 - 750 V, 550 - 1040 tr / min) sont conçus pour être intégrés dans les roues des camions à benne et des trains routiers d'une capacité de chargement de 75 à 180 tonnes. Le moteur est intégré dans la partie centrale de la roue et fixé à la partie fixe par une bride, qui est situé sur un lit rond du moteur. Une extrémité cannelée de l'arbre est utilisée pour transmettre le couple à travers un type d'engrenage planétaire, la seconde est utilisée pour fixer le disque de frein à entraînement électrique ou pneumatique. Les extrémités de sortie du variateur sont situées sur le carter de palier du côté du collecteur. Le moteur n'a pas de boîte à bornes.
L'excitation du moteur électrique est séquentielle; un enroulement d'excitation indépendant (parallèle) est également utilisé. Le moteur a un enroulement de compensation pour améliorer la commutation. La ventilation du moteur est indépendante, avec une alimentation en air par l'une des trappes du collecteur. Degré de protection IP20.
Pour les véhicules électriques extérieurs sans rail (chargeurs, gerbeurs électriques, tracteurs électriques), les moteurs électriques des séries ZDT, GT, DK, RT, ZDV sont produits avec une capacité de 1,35 - 21 kW et une tension de 24 - 110V. Tous les moteurs sont à quatre pôles, les enroulements des ancrages du moteur sont ondulés, faits de fil de cuivre rectangulaire et maintenus dans des rainures par un bandage en ruban de verre ou en fil d'acier étamé.
Les lits des moteurs sont faits de tubes roulants en acier. La plupart des moteurs électriques ont une excitation séquentielle et une exécution fermée avec refroidissement naturel.
Les moteurs des séries DKV et DV se caractérisent par des performances antidéflagrantes.
Les moteurs électriques des séries DRT et DPTR d'une puissance de 2,4 à 19 kW et d'une tension de 80 à 250 V sont conçus pour entraîner les locomotives électriques à batterie de mine. Ils ont une conception antidéflagrante et un refroidissement naturel.
Les moteurs à courant continu des séries DK et ET sont conçus pour les locomotives électriques des mines à contact qui fonctionnent dans des atmosphères non explosives.
Les grandes machines électriques à courant continu sont utilisées pour fonctionner dans les entraînements de pelles à godet unique d'une capacité de godet de 4 m3 ou plus et dans les pelles rotatives.
Les moteurs électriques des séries MPE et MPVE sont utilisés pour entraîner les mécanismes de rotation, de levage, de traction et de marche des pelles hydrauliques et fonctionnent dans des modes de contrôle de vitesse larges, des inversions fréquentes avec de grandes surcharges à court terme. Les générateurs (série GPE), qui font partie des unités de conversion, sont conçus pour alimenter les moteurs électriques des mécanismes des principaux entraînements des pelles.
Les moteurs électriques sont fabriqués avec une puissance de 500 - 1120 kW et une tension de 440 V, et des générateurs - 75 - 2500 kW et une tension de 460, 630, 750, 930 et 1200 V.
Pour alimenter les moteurs d'entraînement des mécanismes d'excavatrice, des générateurs CC de la série 2MP, 2PE (14-520 kW, 115 - 750 V, 1000 - 1500 tr / min) sont également produits.
Des moteurs électriques à courant continu pour excavatrice (série DE) avec une puissance jusqu'à 200 kW sont également utilisés pour les entraînements électriques d'excavatrice.
3 Appareil, principe de fonctionnement
Une machine électrique à courant continu se compose d'un stator, d'une armature, d'un collecteur, d'un porte-balais et de boucliers de roulement (figure 1). Le stator se compose d'un lit (boîtier), de pôles principaux et auxiliaires, qui ont des enroulements de champ. Cette partie fixe de la machine est parfois appelée inductance. Son objectif principal est de créer un flux magnétique. Le lit est fait d'acier, les poteaux principaux et supplémentaires, ainsi que des boucliers de roulement y sont boulonnés. Sur le dessus du lit, il y a des anneaux pour le transport, et sur le bas, il y a des pieds pour fixer la machine à la fondation. Les pôles principaux de la machine sont tirés de tôles d'acier électrique d'une épaisseur de 0,5 à 1 mm afin de réduire les pertes qui se produisent en raison des pulsations du champ magnétique des pôles dans l'entrefer sous les pôles. Les tôles d'acier du noyau du poteau sont pressées et rivetées.
Figure 1 - Machine DC:
I - arbre; 2 - bouclier de roulement avant; 3 - collecteur; 4 - porte-balais; 5 - noyau de l'armature avec un enroulement; b - noyau du pôle principal; Bobine 7 pôles; 8 - lit; 9 - bouclier de roulement arrière; 10 - ventilateur; 11 - pattes; 12 - roulement
![]()
Figure 2 - Pôles d'une machine à courant continu:
a est le pôle principal; b - un poteau supplémentaire; c - enroulement du pôle principal; g - enroulement du pôle supplémentaire; 1 - pointe polaire; 2 - noyau
Aux pôles, le noyau et la pointe se distinguent (figure 2). Un enroulement d'excitation est placé sur le noyau, à travers lequel le courant circule, créant un flux magnétique. L'enroulement de champ est enroulé sur un cadre métallique collé avec un électrocardboard (dans les grandes machines), ou placé sur un noyau isolé avec un électrocardboard (petites machines). Pour un meilleur refroidissement, le serpentin est divisé en plusieurs parties, entre lesquelles il reste des conduits de ventilation. Des poteaux supplémentaires sont installés entre la principale. Ils servent à améliorer la commutation. Leurs enroulements sont connectés en série dans le circuit d'induit, de sorte que les conducteurs d'enroulement ont une grande section transversale.
L'ancre d'une machine à courant continu se compose d'un arbre, d'un noyau, d'un enroulement et d'un collecteur. Le noyau de l'ancre est assemblé à partir de tôles embouties en acier électrique de 0,5 mm d'épaisseur et est pressé des deux côtés à l'aide de nettoyeurs haute pression. Dans les machines avec un système de ventilation radiale, les feuilles de noyau sont collectées dans des emballages séparés de 6 à 8 cm d'épaisseur, entre lesquels des canaux de ventilation de 1 cm de large sont créés. Sur la surface extérieure de l'armature, il y a des rainures pour l'enroulement.
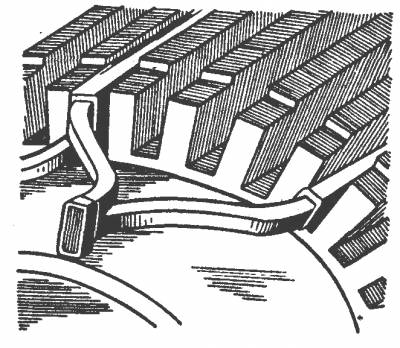
Figure 3 - Emplacement de la section d'enroulement d'induit dans les rainures du noyau
L'enroulement d'induit est constitué de fils de cuivre de section ronde ou rectangulaire sous forme de sections préfabriquées (figure 3). Ils s'insèrent dans des rainures où ils sont soigneusement isolés. L'enroulement est réalisé en double couche: deux côtés de bobines d'ancrage différentes sont placés dans chaque rainure - l'un au-dessus de l'autre. L'enroulement est fixé dans des rainures avec des coins (en bois, getinaksovye ou textolite), et les parties frontales sont fixées avec un bandage métallique spécial. Dans certains modèles, les coins ne sont pas utilisés et l'enroulement est fixé avec un bandage. Le bandage est fait de fil d'acier non magnétique, qui est enroulé avec une précontrainte. Les machines modernes pour ancrer les ancres utilisent du ruban de verre.
Le collecteur d'une machine à courant continu est assemblé à partir de plaques en forme de coin en cuivre laminé à froid. Les plaques sont isolées les unes des autres par des joints collecteurs en micanite d'une épaisseur de 0,5 à 1 mm. Les bords inférieurs (étroits) des plaques ont des découpes en queue d'aronde, qui sont utilisées pour fixer les plaques de cuivre et l'isolation en micanite. Les capteurs sont fixés avec des cônes de pression de deux manières: avec l'un d'eux, la force de la pince n'est transmise qu'à la surface intérieure de la queue d'aronde, la seconde à la queue d'aronde et à l'extrémité de la plaque.
Les collecteurs avec le premier mode de montage sont appelés arqués, avec le second - coin. Les collectionneurs arqués les plus courants.
Dans les plaques collectrices, du côté de l'ancre, avec une petite différence dans les diamètres du collecteur et de l'ancre, des saillies sont faites dans lesquelles des coupes (fentes) sont fraisées. Les extrémités de l'enroulement de l'ancre y sont posées et soudées à l'étain. Avec une grande différence de diamètres, la soudure au collecteur se fait à l'aide de bandes de cuivre, appelées "coqs".
Dans les machines à grande vitesse et à grande vitesse, des bagues de retenue isolées externes sont utilisées pour empêcher le flambage des plaques sous l'action des forces centrifuges.
L'appareil à brosse se compose d'une traverse, de doigts de brosse (boulons), de porte-brosses et de brosses. La traverse est conçue pour y monter les doigts de brosse des porte-brosses formant un circuit électrique.
Le porte-balais se compose d'un porte-bagage dans lequel la brosse est placée, d'un levier pour presser la brosse contre le collecteur et d'un ressort. La pression sur la brosse est de 0,02 à 0,04 MPa.
Pour connecter la brosse au circuit électrique, il y a un câble en cuivre flexible.
Dans les machines à faible puissance, on utilise des porte-balais tubulaires montés dans un écran de roulement. Tous les porte-balais de même polarité sont interconnectés par des jeux de barres, qui sont connectés aux bornes de la machine.
Les pinceaux (figure 4) sont divisés en six groupes principaux, selon la composition de la poudre, la méthode de fabrication et les propriétés physiques: charbon-graphite, graphite, électrographite, cuivre-graphite, bronze-graphite et argent-graphite.
Les boucliers de roulement de la machine électrique servent de pièces de liaison entre le lit et l'armature, ainsi que la structure de support de l'armature, dont l'arbre tourne dans des roulements montés dans les boucliers.
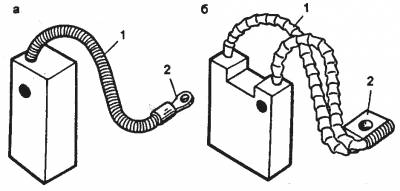
Figure 4 - Brosses:
a - pour les voitures de petite et moyenne puissance; b - pour les machines à haute puissance; 1 - cordon de brosse; 2 - pourboire
Distinguer les blindages des roulements conventionnels et des brides.
Les boucliers de roulement sont fabriqués en acier (moins souvent en fonte ou en alliages d'aluminium) par moulage, ainsi que par soudage ou emboutissage. Au centre du bouclier, un alésage est réalisé pour le roulement: bille ou galet. Dans les machines à haute puissance, dans certains cas, des paliers lisses sont utilisés.
Ces dernières années, le stator des moteurs à courant continu a été assemblé à partir de tôles d'acier électrique séparées. La culasse, les rainures, les pôles principal et supplémentaire sont simultanément estampés dans la feuille.
Rendement moteur
La conversion de l'énergie électrique en énergie mécanique pendant le fonctionnement du DPT s'accompagne de pertes d'énergie. Rapport de puissance mécanique net P 2 sur l'arbre du moteur à la puissance électrique consommée par le réseau P 1 détermine l'efficacité des moteurs
η = ∙ 100% = ∙ 100%
Puissance mécanique nette P 2, retiré de l'arbre du moteur, est calculé par la formule
P 2 = 0,105 M∙n , W (6,9)
où M \u003d M C - moment de résistance sur l'arbre du moteur, Nm;
n - fréquence de rotation de l'arbre moteur, tr / min
Le moteur étant "autorégulé", le couple développé par le moteur, ...
égal au moment de la résistance sur son arbre, c'est-à-dire M BP \u003d M C \u003d M, donc, connaissant la puissance utile du moteur, vous pouvez déterminer son couple par l'expression
M \u003d 9,55, Nm (6,10)
Puissance moteur P 1 est déterminé par la formule
P 1 = U ∙ I = U ∙(Je moi + Je c) W (6.11)
où U est la tension du moteur.
Je = Je moi + Je in - courant consommé du réseau par un moteur à excitation parallèle.
ΔP \u003d Δ P e + Δ P st + Δ P fourrure - la somme de toutes les pertes du moteur à courant continu, watts.
où ΔР e - pertes électriques;
Δ P st - pertes en acier du stator et des ancrages;
Δ P fourrure - pertes mécaniques.
Les pertes électriques ΔР e sont variables, car elles dépendent de la charge et leurs valeurs peuvent être représentées comme
ΔP e \u003d Δ P i + Δ P à + Δ P u
où Δ P i \u003d I i 2 R i - pertes dans l'enroulement d'induit (en mode nominal, elles représentent 50% de toutes les pertes);
Δ P in \u003d I in 2 R in - pertes dans le bobinage de champ;
Δ P u \u003d I i 2 ΔU u - pertes sur le contact collecteur-balai;
ΔU Щ - chute de tension entre la brosse et le collecteur (dépend du matériau des brosses: ΔU Щ \u003d 2 V pour le graphite et 0,6 V pour les brosses en métallographite.)
Perte d'acier Δ P St associée aux courants de Foucault et à l'inversion de l'aimantation de l'armature pendant sa rotation et représente 1 à 3% de la puissance nominale du moteur.
Pertes mécaniques Δ P la fourrure est associée au frottement des pièces mobiles du moteur et représente 1 à 2% de la puissance nominale du moteur. Ces pertes, ainsi que les pertes en acier, sont constantes et indépendantes de la charge du moteur. On les appelle des pertes au ralenti.
Lors de l'exécution de DPT inactif P 2 \u003d 0 et η \u003d 0 avec une augmentation de la puissance nette P 2 le rendement augmente. Les moteurs sont calculés de manière à ce que la valeur maximale de l'efficacité corresponde à la puissance nominale du moteur (alors que les pertes constantes sont égales aux variables). À une charge supérieure au rendement nominal, elle diminue en raison d'une augmentation significative des pertes variables. Pour les machines d'une puissance de 1 à 100 kW, la valeur nominale du rendement se situe entre 74 et 92%.
Les principales caractéristiques du DPT, obtenues théoriquement ou expérimentalement, sont ses caractéristiques mécaniques, ainsi que les caractéristiques de fonctionnement et de réglage.
La caractéristique mécanique du moteur est la dépendance de la vitesse de rotation de l'armature n à partir du moment M sur l'arbre moteur: n \u003d f (M). L'équation de la caractéristique mécanique est l'expression (6.7).
La caractéristique mécanique d'un moteur à excitation parallèle est une ligne droite avec une légère pente lorsque le moment sur l'arbre augmente (Fig. 6.7). Cette caractéristique est appelée «dure».
Fig. 6.7. La caractéristique mécanique du DPT avec excitation parallèle.
La rigidité de la caractéristique mécanique s'explique par le fait que lorsque l'enroulement d'excitation est activé en parallèle avec une augmentation du moment de charge, le courant d'excitation I c et, par conséquent, le flux magnétique du moteur Ф restent inchangés et la résistance d'induit R I est relativement faible.
Les performances du DCT sont les dépendances de la vitesse de rotation n, du moment M, du courant d'induit I I et du rendement η à partir de la puissance nette Р 2 sur l'arbre du moteur à une tension constante à ses bornes U \u003d const.Les caractéristiques de fonctionnement du DCT avec excitation parallèle sont présentées sur la Fig. 6.8.
La dépendance du moment utile de l'arbre du moteur par rapport à la charge P 2 est une ligne presque droite, car le moment de ce moteur est proportionnel à la charge sur l'arbre: M \u003d 9,55 P 2 / n. La courbure de cette dépendance est due à une certaine diminution de la vitesse de rotation avec l'augmentation de la charge. Lorsque P 2 \u003d 0, le courant consommé par le moteur électrique est égal au courant à vide. Avec une augmentation de la puissance développée par le moteur électrique, le courant d'induit augmente approximativement selon la même dépendance que le moment de charge sur l'arbre, car sous la condition Ф \u003d const, le courant d'induit est proportionnel au moment de charge.
Fig. 6.8. Caractéristiques de performance du DPT avec excitation parallèle.
Conformément aux trois méthodes ci-dessus de contrôle du régime moteur, ses caractéristiques de réglage sont les dépendances: n \u003d f (R i), n \u003d f (I in), et n \u003d f (U),
où R I est la résistance du circuit d'induit égale à la somme des résistances de l'induit lui-même et du rhéostat de régulation du courant d'excitation;
I в - courant d'excitation, provoquant un flux magnétique proportionnel d'excitation Ф;
U est la tension fournie à l'enroulement d'induit, soumise à la condition Ф \u003d const, c'est-à-dire I in \u003d const.
Une forme approximative des caractéristiques d'ajustement obtenues à partir de l'expression (6.7) dans la condition M \u003d const est représentée sur la Fig. 6.9.
Fig. 6.9. Caractéristiques de régulation du DCT avec excitation parallèle: a) n \u003d f (R i), b) n \u003d f (I c) c) n \u003d f (U).
1. DC ………………………………………………………… ..1
1.1. Le circuit DC le plus simple ...................... ...................................... 1
1.2. Équilibre de puissance dans le circuit CC le plus simple ..................... ..7
1.3. Connexion en série des résistances …………………………… 9
1.4. Connexion parallèle des résistances ……………………………… .10
1.5. Connexion mixte de résistances ……………………………….… .12
1.6. Ralenti et court-circuit ……………………………………… 13
1.7. Calcul de circuits électriques DC complexes ................... 14
1.7.1. La méthode d'application directe des lois de Kirchhoff .............. 14
1.7.2. La méthode des courants de boucle ………………………………………………… ..17
2. COURANT AC MONOPHASÉ ……………………………………… 18
2.1. Obtention d'un courant alternatif monophasé .............................................. 18
2.2. Circuit à courant alternatif résistif ………………… ..20
2.3 Circuit AC avec résistance inductive ...................... 23
2.4. Circuit à courant alternatif à résistance capacitive ………………… 25
2.5. Circuit série AC
connexion de résistances actives, inductives et capacitives
(circuit série R-L-C) …………………………………………………… .28
2.6. Résonance des tensions ……………………………………………………… ..31
2.7. Circuit CA de connexion parallèle
résistances actives, inductives et capacitives
(circuit R-L-C parallèle) ............................................. 34
2.8. Le concept de conductivité équivalente ………………………………… .36
2.9. Résonance des courants ………………………………………………………………… ..37
3. COURANT AC TRIPHASÉ ...................................... 39
3.1. Courant triphasé et sa réception ……………………………………… 39
3.2. Connexion en étoile. Système triphasé à quatre fils ........... 41
3.3 Connexion en étoile. Système de courant triphasé à trois fils ……… 46
3.4. La connexion selon le "triangle" ...................................... 48
3.5. Puissance d'un système triphasé ………………………………………………… 50
3.6. Mesures de consommation d'énergie
récepteurs de puissance triphasés ………………………………… .. ……… ..50
4. TRANSFORMATEURS ……………………………………………………………. 53
4.1. Objectif, portée et classification des transformateurs.53
4.2. Le dispositif et le principe de fonctionnement d'un monophasé
transformateur à double enroulement …………………………………………… ..54
4.3. Ralenti du transformateur …………………………………………… ..56
4.4. Circuit équivalent du transformateur au ralenti. ………… ..60
4.5. Amener l'enroulement secondaire du transformateur ……………………… ..60
4.6. Circuit équivalent transformateur en mode de fonctionnement …………………… 62
4.7. Diagramme vectoriel du mode de fonctionnement du transformateur ……………… ..63
4.8. Efficacité du transformateur ……………………… 65
4.9. Détermination expérimentale des paramètres du transformateur ……… .66
4.9.1. Expérience de marche au ralenti ……………………………………………………… ..67
4.9.2 .. Expérience de court-circuit …………………………………………… ..69
4.10 Caractéristiques de charge du transformateur ………………………… ..71
5. MOTEURS ÉLECTRIQUES AINCHRONES ... ………………………………… 72
5.1. Le principe de fonctionnement et la portée des moteurs asynchrones .... .72
5.2. Obtention d'un champ magnétique rotatif …………………………… ..73
5.3. Conception des moteurs asynchrones ……………………………………… 77
5.4. Glide ...................................................................
5.5. Flux magnétique et CEM d'un moteur à induction …………………… .79
5.6. Les équations de base d'un moteur à induction ...................................... ..80
5.7. Apporter les paramètres de l'enroulement rotorique à l'enroulement statorique …………… .81
5.8. Diagramme vectoriel d'un moteur à induction ………………………… ..82
5.9. Circuit équivalent moteur asynchrone ………………………………… 82
5.10. Perte de puissance et d'efficacité d'un moteur à induction ...................... ... .83
5.11. L'équation du couple .......................................... 85
5.12. Caractéristiques mécaniques d'un moteur à induction ..................... 85
5.13. Caractéristiques de performance d'un moteur à induction ……………………… 88
5.14. Démarrage, contrôle de vitesse et freinage
moteur à induction …………………………… .. 88 ………………………… 88
6. MOTEURS CC ………………………… 90
6.1. Rendez-vous, appareil et méthodes d'excitation
moteurs à courant continu ………………………………………………… .. …… .90
6.2. Le principe de fonctionnement d'un moteur à courant continu
et ses équations de base ……………………………………………………… 92
6.3. Démarrage et inversion d'un moteur à courant continu …………………… .94
6.4. Régulation du régime moteur …………………………… 96
6.5. L'efficacité du moteur …………………………… .98
6.6. Caractéristiques clés d'un moteur à courant continu ………………… 99

